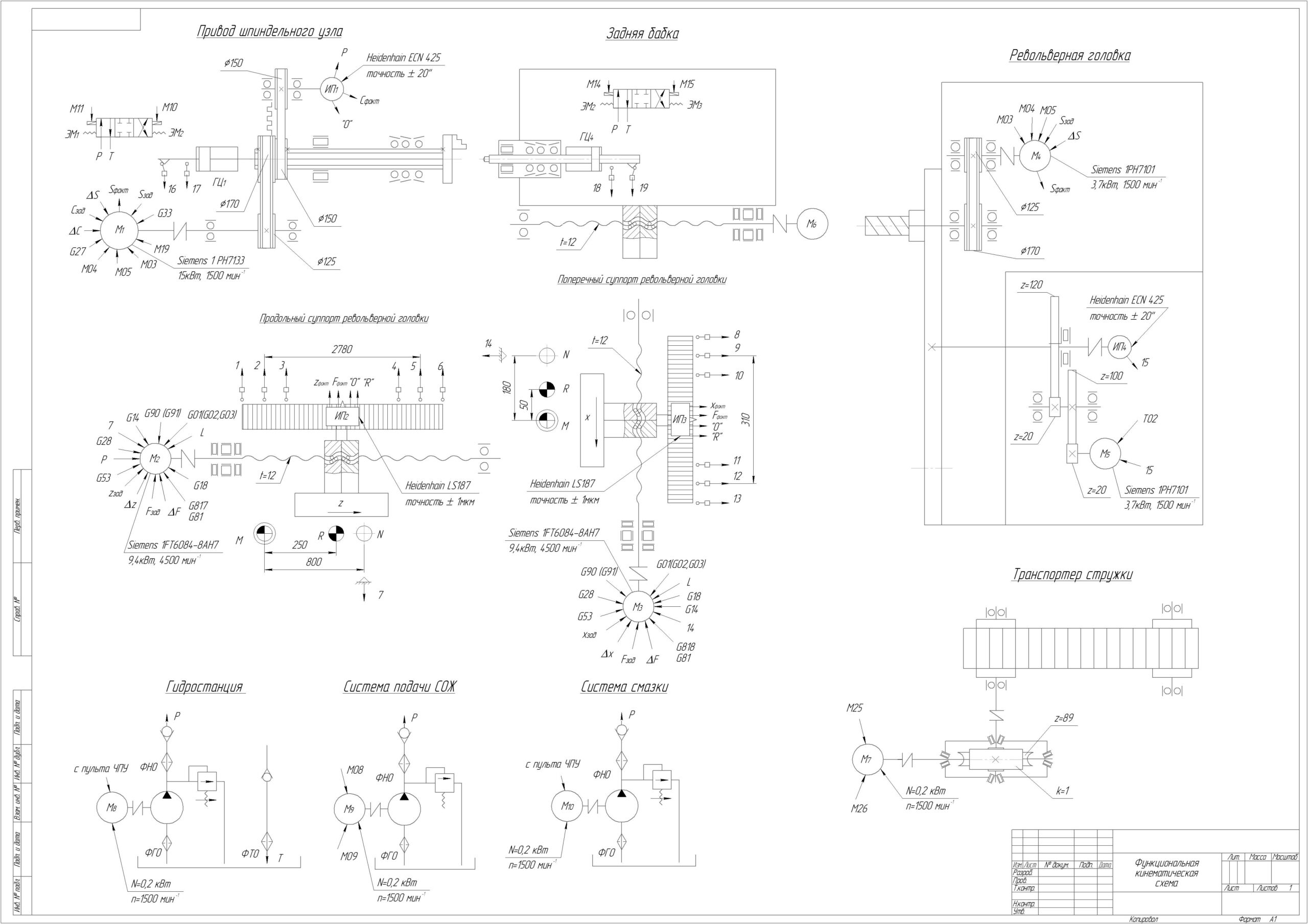
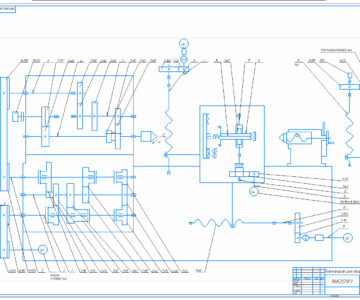
В работе представлена функциональная кинематическая схема токарного многоцелевого станка. Шпиндель может работать в двух режимах: точение и фрезерование. Револьверная головка станка имеет привод для вращения осевого инструмента. Револьверная головка перемещается по двум координатам. Задняя бабка имеет управляемый привод. В схеме представалены сигналы, подаваемые из системы СЧПУ к рабочим органам станка и сигналы, снимаемые с измерительных преобразователей и отправляемые в СЧПУ. В качестве приложения к схеме в ворде описаны эти сигналы.
Содержание ПЗ:
1 Управление приводами станка
Реализация обратной связи по положению
Реализация обратной связи по скорости
Аварийный останов привода
Функция работы в относительной и абсолютной системе координат
Функция согласования
Функция автоматического выхода рабочего органа в ноль станка
Функция реферирования
Автоматический выход рабочего органа в точку смены инструмента
Функция работы с постоянными технологическими циклами
Функция коррекции управляющей программы
2 Логическая задача
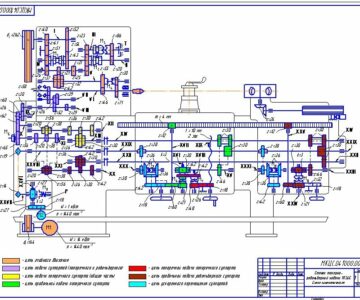
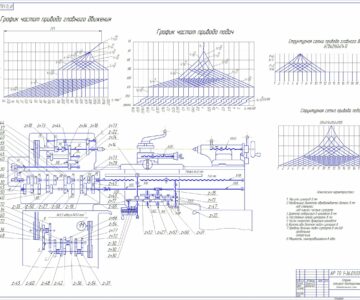
Управление приводом главного движения на станке
Управление автоматическим циклом смены инструмента
Вспомогательные функции (гидростанция, система подачи СОЖ, система смазки, транспортер стружки, зажим/разжим заготовки в шпинделе, зажим/разжим заготовки в задней бабке)
3 Технологическая задача
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности