Белорусский Национальный Технический Университет
Кафедра Теория механизмов и машин
Курсовой проект по дисциплине: Теория механизмов и машин
На тему: "Исследование динамики машинного агрегата автобуса междугороднего"
Минск 2013
Содержание
Задание_________________________________________________________5
1. Описание работы машины и исходные данные для проектирования__6
2. Блок схема алгоритма исследования динамической
нагруженности машинного агрегата_____________________________9
3. Динамика машинного агрегата__________________________________11
3.1. Постановка задачи динамического синтеза и анализа
машинного агрегата _____________________________________________11
3.2. Структурный анализ рычажного механизма двигателя
внутреннего сгорания____________________________________________11
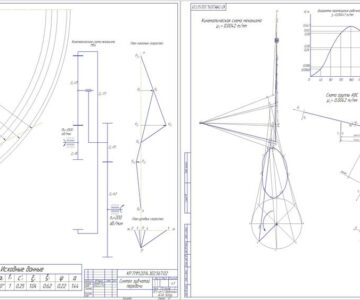
3.3. Определение геометрических размеров рычажного механизма_______12
3.4. Расчёт кинематических характеристик рычажного механизма._______13
А. Графическое решение задачи
3.4.1. Построение планов положения механизма_______________________13
3.4.2. Построение плана аналогов скоростей__________________________14
3.4.3. Расчёт первых передаточных функций механизма________________15
Б. Аналитическое решение задачи.
3.4.4. Составление схемы алгоритма по определению
кинематических характерисик механизма____________________________16
3.4.5. Расчёт кинематических характеристик механизма в
контрольном положении_________________________________________18
3.5. Выбор динамической модели____________________________________20
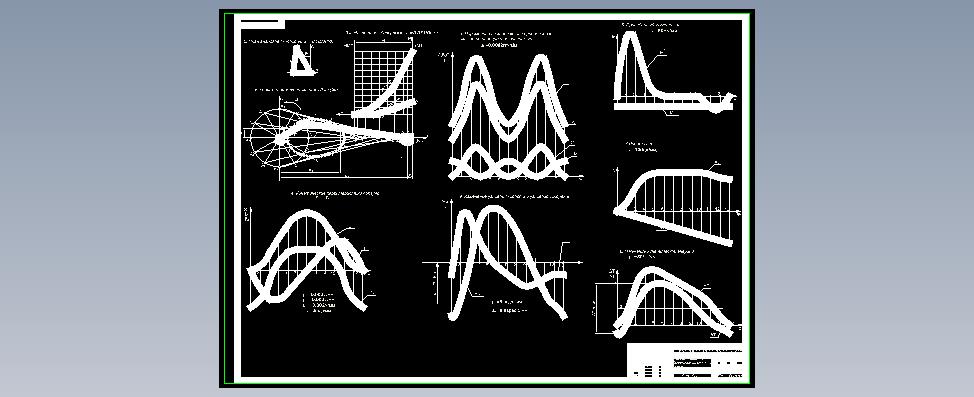
3.6. Построение индикаторной диаграммы и расчет движущей
силы, действующей на ползун для всех 13 положений__________________20
3.7. Определение приведённого момента движущих сил и расчёт в
одном контрольном положении_____________________________________21
3.8. Составление схемы алгоритма для определения приведенного
момента сил сопротивления_______________________________________23
3.9. Составление схемы алгоритма по определению
постоянной составляющей приведенного момента инерции______________23
3.10. Расчёт момента инерции маховика______________________________24
3.11. Составление алгоритма по определению закона движения
звена приведения________________________________________________24
3.12. Определение закона вращения звена приведения__________________25
3.13. Схема алгоритма программы исследования
динамической нагруженности машинного агрегата____________________ 26
3.14. Составление исходных данных для ЭВМ_________________________28
3.15. Обработка результатов расчёта_________________________________29
3.16. Выводы____________________________________________________32
4. Динамический анализ рычажного механизма_____________________33
4.1. Постановка задачи динамического анализа рычажного механизма
и методы их расчёта______________________________________________33
А. Графическое решение задачи.
4.2. Построение плана положений механизма в одном
контрольном положении___________________________________________33
4.2.1. Построение плана скоростей механизма и расчёт линейных и
угловых скоростей точек и звеньев механизма_________________________34
4.2.2. Построение плана ускорений механизма и расчёт линейных и
угловых ускорений точек и звеньев механизма________________________34
Б. Аналитическое решение.
4.3. Составление схемы алгоритма расчёта кинематики
рычажного механизма______ _____________________________________36
4.3.1. Расчёт скоростей и ускорений точек и звеньев механизма в
одном контрольном положений_____________________________________36
4.4. Сравнительный анализ кинематики механизма_____________________37
4.5. Расчёт сил действующих на звенья механизма – сил веса
(тяжести); движущих сил; сил инерции звеньев механизма_____________38
4.6. Кинетостатический силовой расчёт рычажного механизма___________38
А. Графическое решение задачи.
4.6.1. Построение схемы сил группы Ассура (2, 3)_____________________38
4.6.2. Расчёт тангенциальной составляющей реакции R_21^τ________________39
4.6.3. Построение плана сил группы Ассура (2, 3)______________________39
4.6.4. Расчёт параметров реакций во всех кинематических парах
группы Ассура (2, 3)_____________________________________________40
4.6.5. Построение схемы сил механизма первого класса_________________40
4.6.6. Определение уравновешивающего момента сил_________________40
4.6.7. Построение плана сил входного звена___________________________41
4.6.8. Определение параметров реакции в коренном
подшипнике (кинематической паре O)________________________________41
Б. Аналитическое решение задачи
4.7. Составление схемы алгоритма силового расчёта группы Ассура (2, 3)
и механизма первого класса_______________________________________41
4.8. Сравнение результатов силового расчёта аналитическим и
графическим методами____________________________________________43
4.9. Подготовка исходных данных для ЭВМ__________________________43
4.10. Обработка результатов расчёта_________________________________44
4.10.1. Построение годографа реакции R_21 (φ_23)_______________________ 44
4.10.2. Построение годографа реакции R_10 (φ_10)________________________44
4.10.3. Построение годографа реакции R_23 (φ_23)________________________45
4.10.4. Построение графика зависимости реакции R_30 (S_B) в
поступательной паре механизма____________________________________45
4.11. Анализ годографов реакций и графика реакции__________________46
4.12. Выводы по разделу___________________________________________46
5. Синтез кулачкового механизма__________________________________47
5.1. Постановка задачи синтеза кулачкового механизма и методы
их решения______________________________________________________47
5.2. Исходные данные для проектирования
кулачкового механизма____________________________________________48
5.3. Схема алгоритма определения кинематических характеристик
движения толкателя______________________________________________48
5.4. Расчёт кинематических характеристик для 2-ух
контрольных положений___________________________________________50
5.5. Построение упрощённой совмещённой диаграммы и
определение основных параметров механизма_________________________51
5.6. Схема алгоритма по определению полярных и декартовых
координат центрового профиля____________________________________52
5.7. Расчёт полярных и декартовых координат центрового профиля кулачка
в 2-х контрольных положениях_____________________________________53
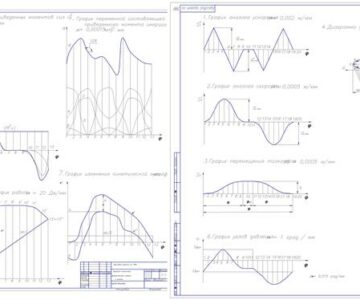
5.7.А. Построение кинематических диаграмм толкателя_________________53
5.8. Подготовка исходных данных для ЭВМ и расчет на ЭВМ.__________53
5.9. Построение кинематических диаграмм движения толкателя. _________53
5.9.А. Диаграмма перемещения толкателя_____________________________53
5.9.Б. Диаграмма аналога скорости толкателя ________________________54
5.9.В.Диаграмма аналога ускорения толкателя _______________________54
5.10. Построение полной совмещенной диаграммы и определение
уточненных значений основных параметров механизма.________________54
5.11. Построение центрового профиля кулачка
(графическим методом).________________________________________55
5.12. Определение радиуса ролика и построение действительного
профиля кулачка_________________________________________________56
5.13. Выводы к разделу____________________________________________56
Заключение_____________________________________________________57
Исходные данные:
Диаметр поршня d,м - 0,15
Отношение длины кривошипа к длине шатуна - λ = 0,28
Коэффициент неравномерности вращения - 0,066
Ход поршня S,м - 0,18
Зубчатая передача
Частота вращения карданного вала - 150
Число зубьев Z*, Z** - 14,25
Приведенный к водилу момент инерции трансмиссии - 8
Передаточное отношение планетарной передачи U1H - 11,2
Кулачковый механизм
Ход толкателя, м - 0,015
Углы удаления, дальнего стояния и возвращения, град - 60;0;60
Допустимый угол давления, град - 30
Закон движения на фазе удаления - линейный
Закон движения на фазе возвращения - синусоидальный






Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности