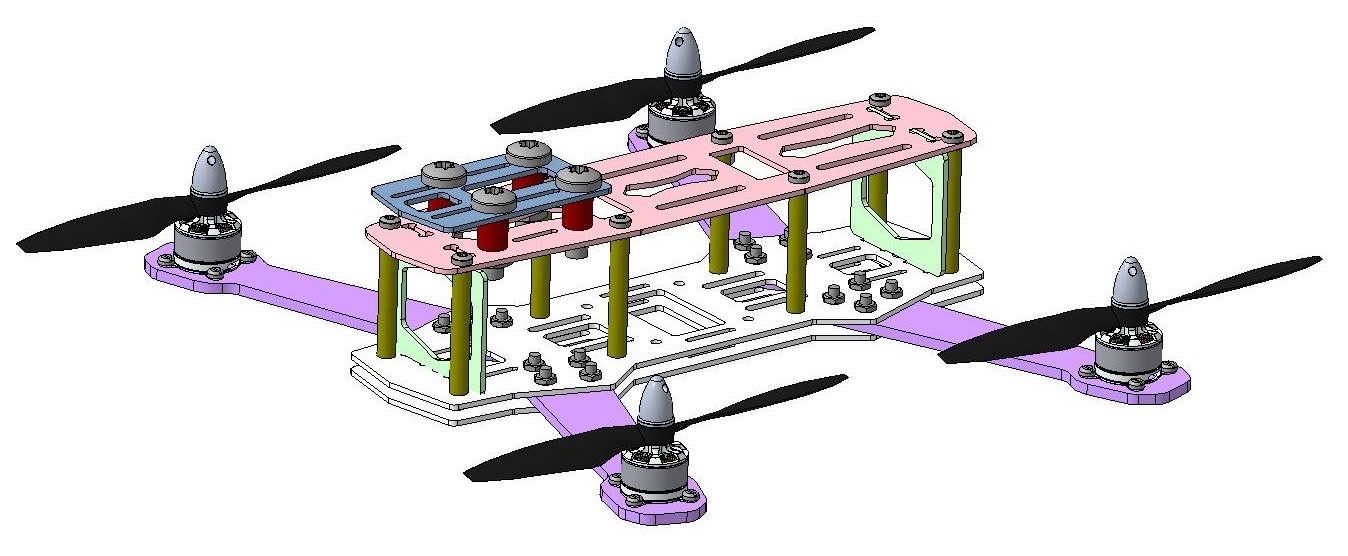
Наиболее распространенный вариант мультикоптера это квадрокоптер – с четырьмя роторами вращающимися диагонально в противоположных направлениях. Управляет роторами процессор, собирающий данные с трех гироскопов, позволяющих определять и фиксировать положение в пространстве во всех трех плоскостях. Акселерометр дает возможность процессору устанавливать абсолютно горизонтальное положение. Бародатчик позволяет фиксировать квадрокоптер на нужной высоте. Смещение квадрокоптера в пространстве происходит за счет изменения скорости вращения той или иной пары моторов. Квадрокоптер кренится и осуществляет перемещение.
- Главная -
- Чертежи -
- Транспорт -
- Самолеты и авиация -
- Вертолет-квадрокоптер
Вертолет-квадрокоптер
1
182
7222
20
0
20
Сообщить о проблеме
Содержимое архива
-
02 Ножка.m3d
-
Magnets.m3d
-
08 Втулка.m3d
-
Shaft.m3d
-
Anti rotating pin.m3d
-
Stator holder .m3d
-
E rings.m3d
-
06 Ось.m3d
-
04 Плата.m3d
-
Front housing.m3d
-
Coil.m3d
-
Stator assembly.a3d
-
03 Пропеллер.m3d
-
07 Основание.m3d
-
Bullet holder.m3d
-
MT-1306.a3d
-
Rotor Assembly.a3d
-
01 Плата.m3d
-
Сборка общий вид.jpg
-
Сборка общий вид.a3d
-
05 Рама.m3d
-
Stator package .m3d
-
radial ball bearing_68_iso_ISO 15 RBB - 182 - Full,DE,AC,Full_68.m3d
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:



Комментариев пока нет
Чтобы оставить комментарий, необходимо войти
Войти с помощью:
Ссылка на логин через google
Ссылка на логин через vk
Ссылка на логин через yandex