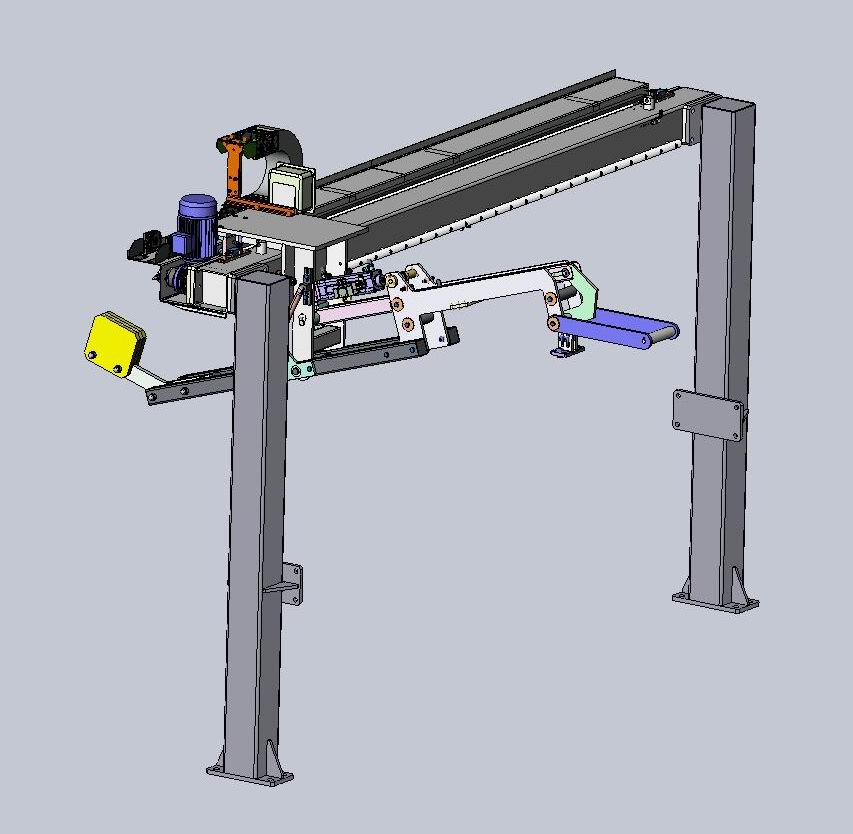
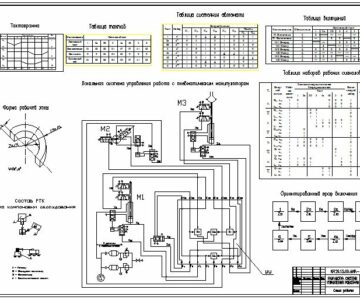
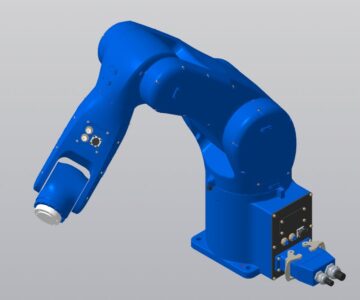
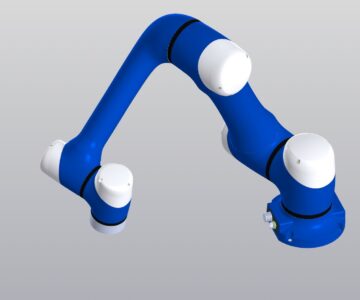
Манипулятор двухкоординатный. При отключении пневматического привода в конструкции предусмотрена ручная подача по оси Z. По оси Х движение осуществляется асинхронным электроприводом. Разработка является средством автоматизации технологического процесса неразрушающего контроля изделия
- Главная -
- Чертежи -
- Автоматизация и управление -
- Промышленные роботы и робототехника -
- Электропневматический манипулятор
Электропневматический манипулятор
0
295
32827
1
0
60
Сообщить о проблеме
Содержимое архива
-
Манипулятор электропневматический.STEP
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:
Комментариев пока нет
Чтобы оставить комментарий, необходимо войти
Войти с помощью:
Ссылка на логин через google
Ссылка на логин через vk
Ссылка на логин через yandex