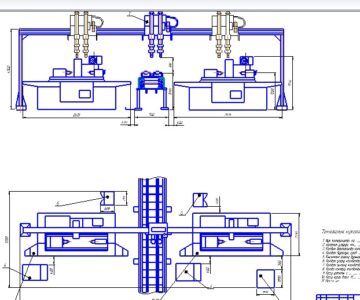
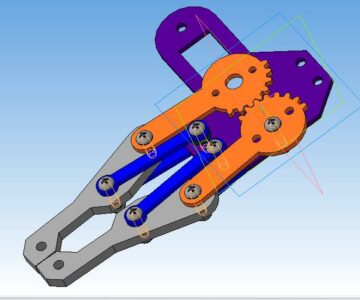
Захват, крепящийся на манипулятор промышленного робота. Способен транспортировать детали с крупным внутренним отверстием, посредством разжатия пальцев захвата внутри отверстия, либо плоские детали посредством смыкания их на поверхностях деталей.
- Главная -
- Чертежи -
- Автоматизация и управление -
- Промышленные роботы и робототехника -
- Захват четырехпалый промышленного робота
Захват четырехпалый промышленного робота
0
11
1281
8
0
100
Сообщить о проблеме
Автор
Дата
16.02.2018
Язык
Русский
Состав
3D Сборка
Софт
КОМПАС-3D V15.1
Как открыть?
Содержимое архива
-
захват
-
крышка.m3d
-
корпус захвата.m3d
-
шестерня111.m3d
-
шуп.m3d
-
Сборка захвата.a3d
-
вал.m3d
-
перемычка.m3d
-
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:
Задания с фриланса
Курсовой работу по техническому заданию "Разработать техническое предложение на изделие "Робот"
договорная
5 дней назад
6 дней назад
Комментариев пока нет
Чтобы оставить комментарий, необходимо войти
Войти с помощью:
Ссылка на логин через google
Ссылка на логин через vk
Ссылка на логин через yandex