Карагандинский государственный технический университет
Кафедра ТМ
Курсовой проект по дисциплине "Основы автоматики и автоматизации производственных процессов"
На тему: " Проектирование промышленного робота манипулятора"
Караганда 2016
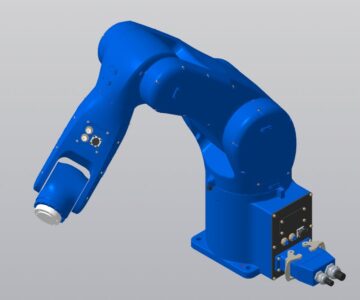
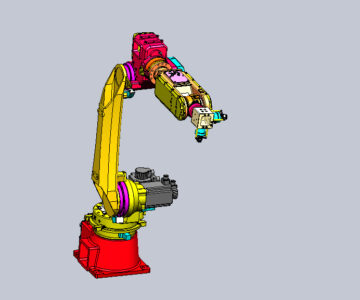
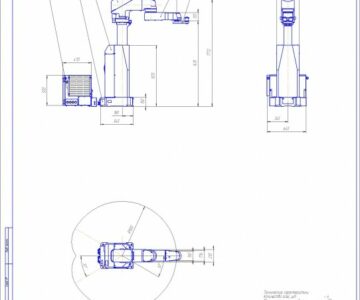
Исходные данные: деталь корпус - 3,7 кг, фрезерный станок, подвесной робот
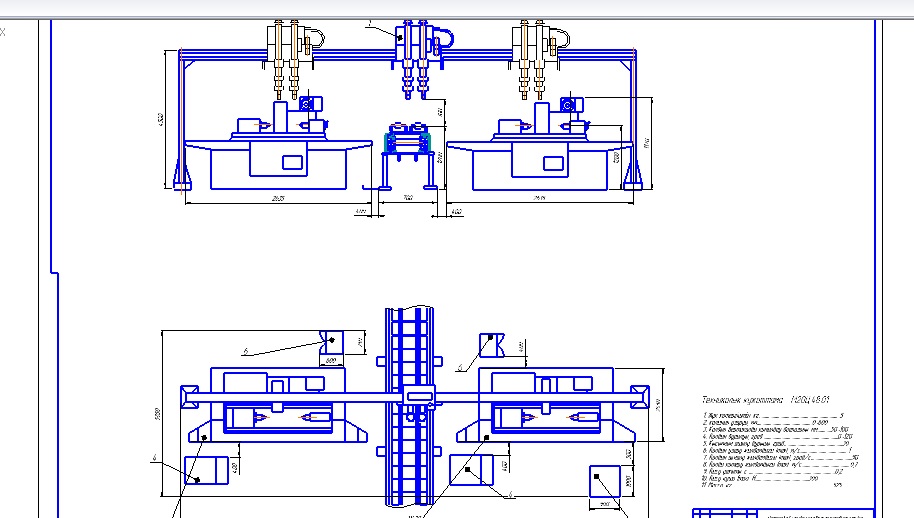
В данной работе рассматривается подвесной робот манипулятор для фрезерных станков , с захватом руки для деталей массой не более 10 кг.
В течение длительного времени в различных отраслях производства сосуществовали, почти не смешиваясь и не влияя друг на друга, два разнородных вида производства.
Первый вид — это высокоавтоматизированное и высокоэффективное массовое производство, которое базируется на высокопроизводительных поточных и автоматических линиях, многопозиционном и многоинструментальным технологическом оборудовании. Широкомасштабная автоматизация автомобильной, тракторной, подшипниковой, часовой промышленности и других отраслей, начатая еще в 50-е годы, привела повсеместно к созданию «безлюдных» производств в масштабах участков и даже цехов. Однако такие производства до недавнего времени базировались в основном на специальном оборудовании, которое не обладало «гибкостью», способностью переналаживаться на выпуск разнообразной продукции. В результате при смене объектов производства подавляющая часть технологического оборудования, оснастка и инструменты списывались независимо от физического состояния.
Второй вид—это неавтоматизированное серийное и индивидуальное производство, которое всегда базировалось на универсальном технологическом оборудовании с ручным управлением, ручной или механизированной сборке, контроле, транспортировке и складировании изделий. Такое производство обладает высокой «гибкостью» с точки зрения выпуска разнообразнейшей продукции, однако малопроизводительно, требует непосредственного участия человека во всех элементах производственного процесса преимущественно на уровне ручного труда.