Ярославский государственный технический университет
Кафедра «Компьютерно-интегрированная технология машиностроения»
Курсовой проект по дисциплине "Автоматизация технологических процессов на основе ГПС"
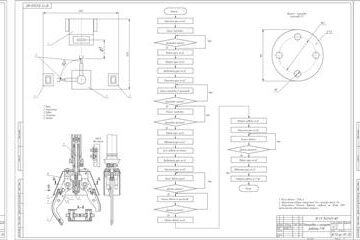
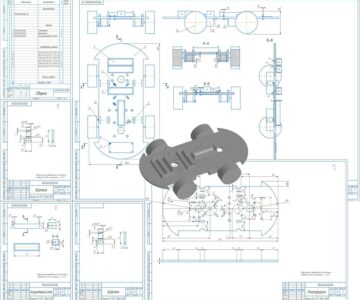
На тему : «Разработка мехатронной системы в виде устройства автоматической смены инструмента»
Ярославль 2019
Исходные данные:
q1П = π - обобщенная координата поворота;
q2П = 115 мм - обобщенная координата подъема;
q3П = π - обобщенная координата поворота.
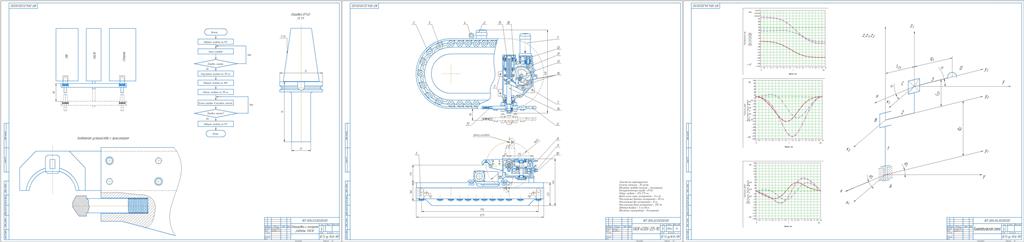
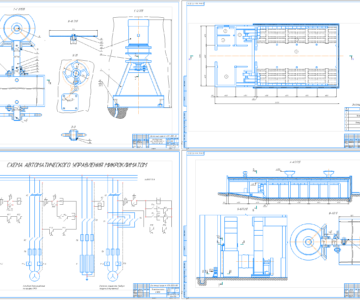
В данной работе рассматриваются существующие системы автоматической смены инструмента. Проведено кинематическое исследование, определена погрешность, произведен динамический расчет исполнительных механизмов и расчет поворотного устройства инструментальных гнезд магазина инструментов для УАСИ PRAGATI.
Содержание
1. Задание на курсовую работу………………………………………………….3
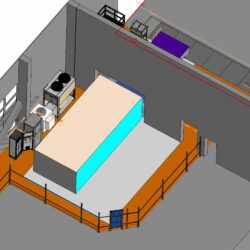
2. Разработка компоновки РТК..........................................................................4
3. Разработка технических требований и определение основных
параметров робота....................................................................................................7
4. Кинематическое исследование манипулятора..............................................8
5. Определение погрешности позиционирования точки D захвата................12
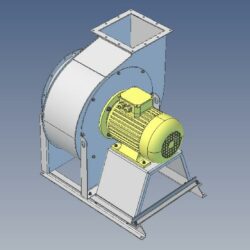
6. Динамический расчет исполнительных механизмов манипуляторов........13
7. Выбор параметров привода выдвижения штанги руки манипулятора......17
8. Расчет пневматического поворота..................................................................18
9. Приложения...................................................................................................19
10. Вывод………………………………………………………………………….23
11. Список использованной литературы............................................................23

Есть ли у вас использованная литература в электронном виде?
Замечательный курсача, есть вопрос по использованной литературе
тут и задавайте, для этого и существую комментарии
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности