Самарский государственный технический университет
Кафедра механика
Курсовой проект по дисциплине "Теория машин и механизмов"
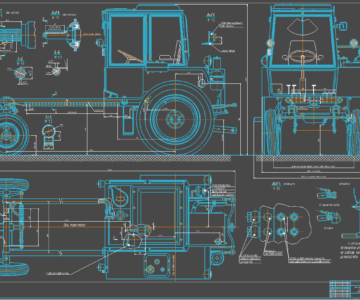
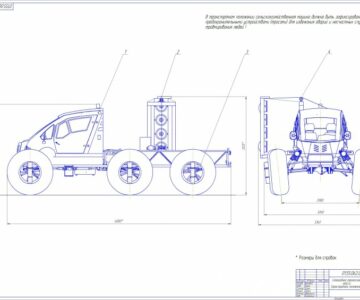
На тему: "Самоходное шасси"
Самара 2016
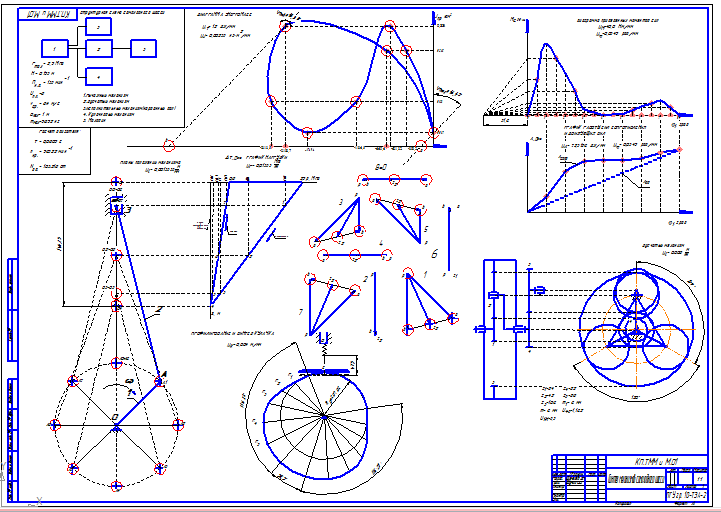
Исходные данные Ход ползуна 0.12 м, эксцентриситет равен 0, максимальный угол давления между шатуном и кривошипом 11.5 градусов
В данной работе рассматривается самоходное шасси, проводится кинематический анализ, динамические исследования, силовой расчет, и т. д.
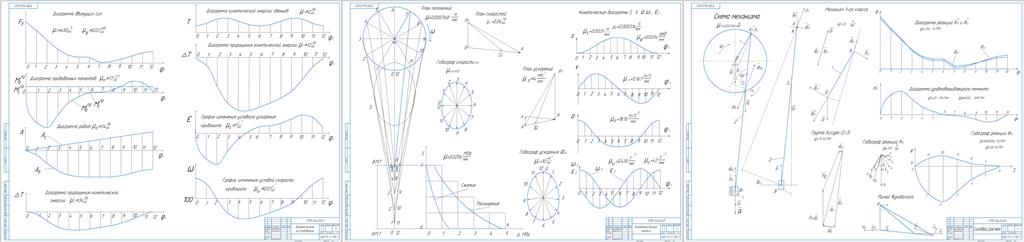
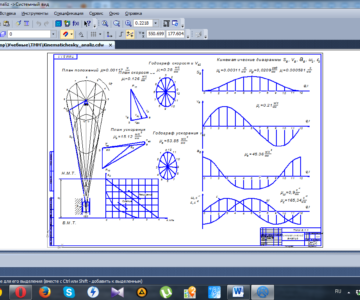
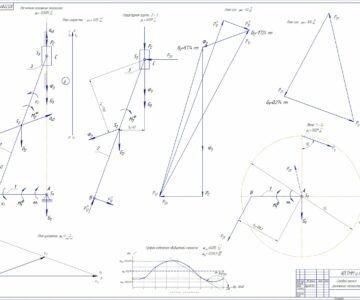
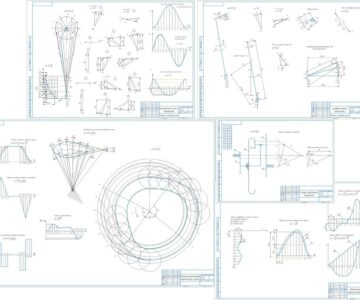
Графическая часть содержит динамические исследования (диаграммы), силовой расчет (схема механизма, рычаг жуковского, план скоростей, план ускорений, диаграммы, годографы), кинематический анализ (план положений, динамические диаграммы)
Содержание
Содержание. 2
Задание. 3
Введение. 3
1.Структурный анализ механизма. 3
2.Кинематический анализ 4
2.1. Кинематический синтез кривошипно-ползунного механизма. 5
2.2. План положений. 4
2.3. План скоростей и ускорений. 6
2.3.1. План скоростей. 6
2.3.2. План ускорений. 7
2.4. Кинематические диаграммы. 9
3. Силовой расчет. 11
3.1. Силовой расчёт группы Ассура второго класса. 11
3.1.1.Определение сил инерции. 11
3.1.2.Определение сил тяжести. 12
3.1.3. Определение реакций в кинематических парах. 12
3.2 Силовой расчёт механизма I класса. 14
3.2.1 Определение силы тяжести. 15
3.2.2 Определение реакций в кинематических парах. 15
3.3 Рычаг Жуковского. 16
Список литературы. 17
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности