Самарский государственный технический университет
Кафедра «Механика»
курсовая работа по дисциплине "теории машин и механизмов"
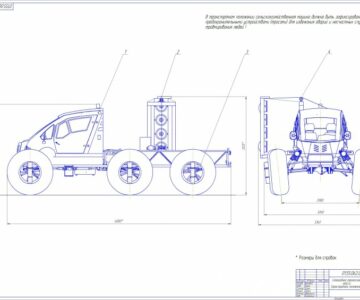
на тему :"проектирование и исследование самоходного шасси"
Самара 2015
Целью данного курсового проекта является проектирование и исследование самоходного шасси.
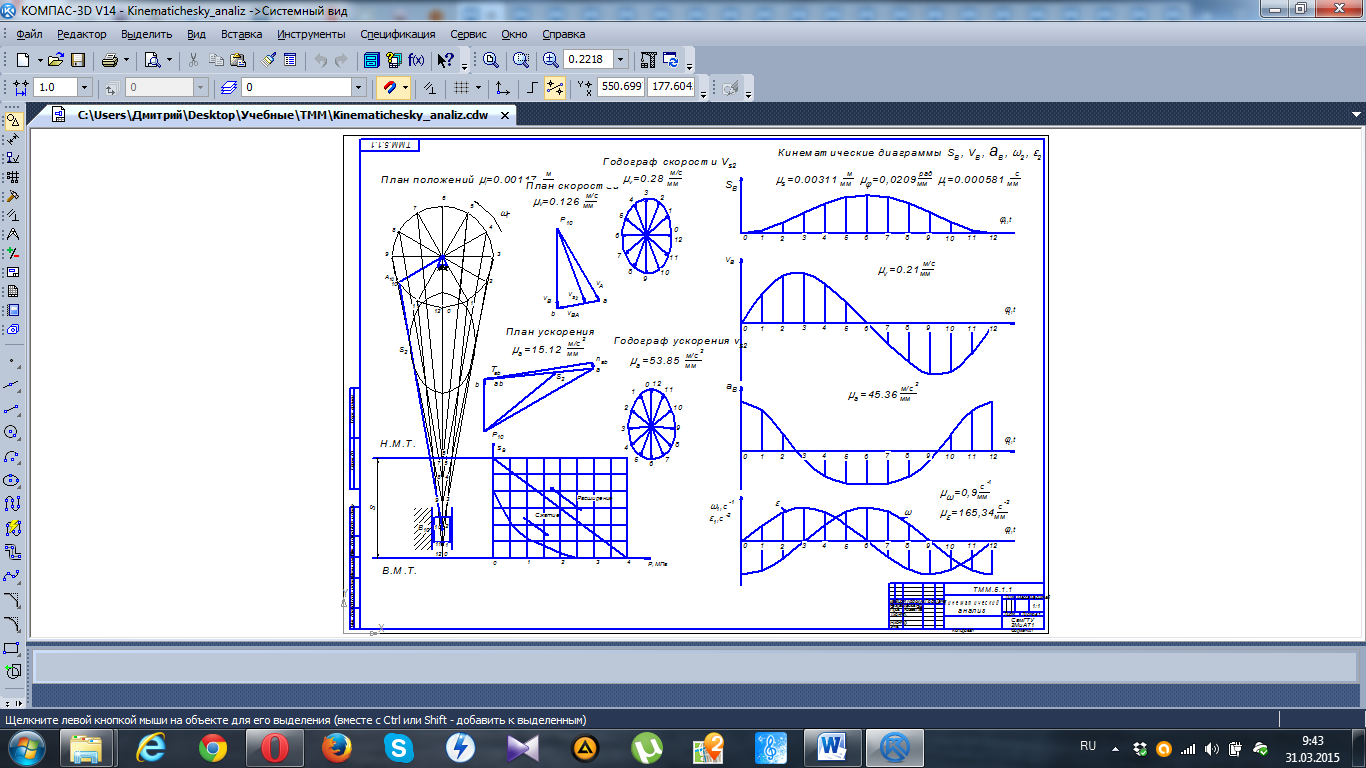
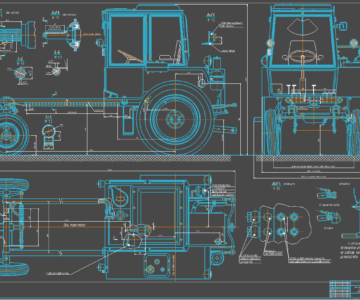
1. Структурный анализ механизма
Кривошипно-ползунный механизм состоит из четырех звеньев:
0 – стойка;
1 – кривошип;
2 – шатун;
3 – ползун.
Также имеются четыре кинематические пары:
I – стойка 0-кривошип OA;
II – кривошип OA-шатун AB;
III – шатун AB-ползун B;
IV – ползун B-стойка 0.
I, II и III являются вращательными парами. IV – поступательная пара.
Все кинематические пары являются низшими, т.е. pнп=4, pвп=0.
Степень подвижности механизма определяется по формуле Чебышева:
W=3∙n-2p_нп-p_вп
где n – число подвижных звеньев, n =3
pнп – число низших пар,
pвп – число высших пар.
W=3∙3-2∙4=1
По классификации И.И. Артоболевского данный механизм состоит из механизма I класса (стойка 0-кривошип OA) и структурной группы II класса второго порядка (шатун AB-ползун B). Из этого следует, что механизм является механизмом II класса.
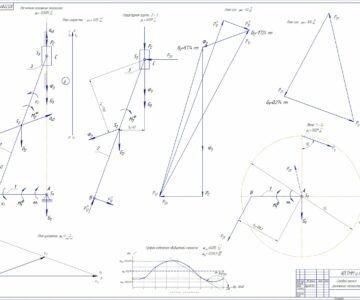
Первоочередной задачей проектирования кривошипно-ползунного механизма является его синтез, т. е. определение размеров звеньев по некоторым первоначально заданным параметрам:
Масса звеньев: шатуна m_2=ql_2, где q=10 кг/м; ползуна m_3=0,3m_2; кривошипа m_1=2m_2.
Центр масс шатуна в точке S_2 с координатой AS_2=0,35AB.
Момент инерции относительно центра масс шатуна JS_2=0,17m_2 l_2^2.
Угловая скорость ω=180 c^(-1).
Ход ползуна S=0,14 м.
Отношение хода поршня к его диаметру S⁄D=1 м.
Отношение длины кривошипа к длине шатуна λ=l_1⁄l_2 =0,2.
Приведенный момент инерции трансмиссии I_n^0=1,8 кг∙м.
Коэффициент неравномерности вращения кривошипа δ=0,012.






Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности