Белорусский национальный технический университет
Кафедра металлорежущих станков и инструментов
Курсовой проект по дисциплине "Проектирование оборудования инструментального проихводства"
На тему "Разработка кинематики токарно-револьверного станка 1А341"
Минск 2016
Исходные данные: эффективная мощность резания 6 кВт; частота вращения двигателя 1450 мин(-1); максимальная частота вращения шпинделя 3150 мин(-1); минимальная частота вращения шпинделя 250 мин(-1); число диапазонов регулирования коробки скоростей 12, главный привод со ступенчатым регулированием.
В работе описывается назначения, компоновка токарно-револьверного станка 1А341, описываются технологические схемы обработки на токарно-револьверном станке. Приводится кинематический расчет привода главного движения со ступенчатым регулированием частоты вращения шпинделя. Выполняется кинематический расчет привода главного движения, расчет передаточных отношений передач привода. Так же был произведен патентно-информационный поиск шпиндельных узлов токарных станков
Содержание
Введение 5
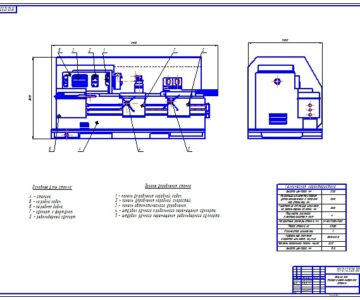
1. Описание назначения, компоновки и движений станка токарно-револьверного с горизонтальной головкой 6
1.1 Описание назначения токарно-револьверного станка 1А341 6
1.2 Описание компоновки токарно-револьверного станка 1А341 8
1.3 Описание всех движений токарно-револьверного станка 1А341 9
2 Описание технологических схем обработки, движений формообразований и методов образований поверхностей деталей при обработке на станке 10
2.1 Описание технологических схем обработки на токарно-револьверном станке 10
2.2 Описание движения формообразования на токарно-револьверном станке 13
2.3 Описание образования поверхностей при обработке на токарно-револьверном станке 15
3 Расчёт мощностей главного привода 17
4 Кинематический расчёт главного привода 18
4.1 Расчет диапазона регулирования частот вращения шпинделя 18
4.2 Расчёт знаменателя геометрического ряда частот вращения 18
4.3 Округление знаменателя геометрического ряда частот до стандартного значения 18
4.4 Расчет промежуточных значений частот вращения шпинделя 18
4.5 Округление частот вращения шпинделя до стандартных значений 19
4.6 Оптимизация структурной формулы множительной структуры 20
4.7 Определение числа делений изображающих частоту вращения электродвигателя 20
4.8 Разбивка числа делений, изображающих частоту вращения электродвигателя, на отдельные групповые передачи 21
4.9 Построение графика частот главного привода со ступенчатым регулированием 22
4.10 Определение передаточных отношений и передаточных чисел 25
4.11 Подбор чисел зубьев зубчатых колес 26
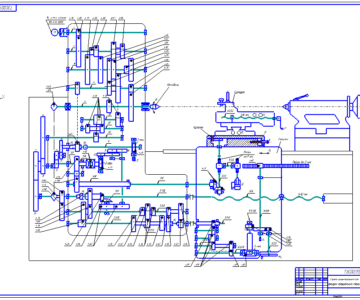
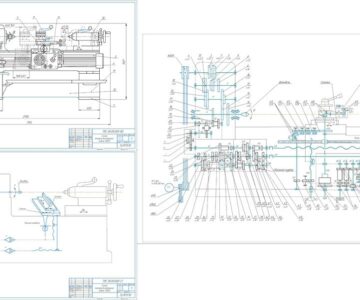
5 Разработка кинематической схемы главного привода со ступенчатым регулированием 28
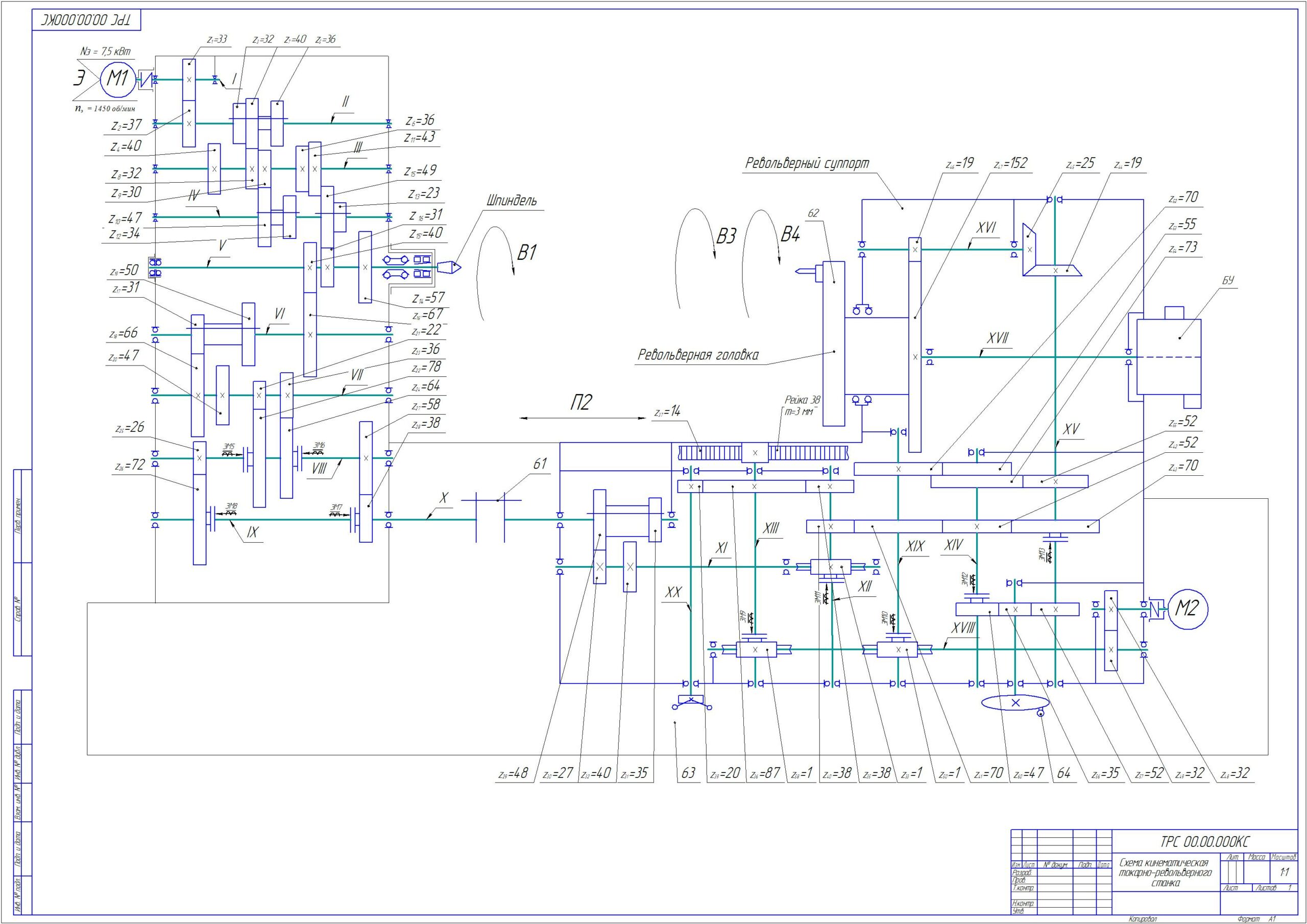
6 Кинематическая схема токарно-револьверного станка модели 1А341 и уравнений кинематического баланса кинематических цепей 31
6.1 Кинематическая цепь привода главного движения (В1) 32
6.2 Кинематическая цепь продольной подачи (В1 и П2) 33
6.3 Кинематическая цепь поперечной подачи с вращением револьверной головки (В1 и В3) 34
6.4 Кинематическая цепь быстрого поворота револьверной головки (В4). 35
6.5 Кинематическая цепь ручного перемещения револьверного суппорта (П2). 36
6.6 Кинематическая цепь ручного быстрого поворота револьверной головки (В4). 36
7 Патентно-информационный поиск конструкций шпиндельных узлов аналогичных проектируемым 37
7. 1 Информационный поиск 37
7.2 Патентный поиск 40
8. Охрана труда 66
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности