Тихоокеанский государственный университет
Кафедра "Детали машин"
Курсовой проект по дисциплине "Теория механизмов и машин"
На тему: "Анализ плоского рычажного шестизвенного механизма и синтез зубчатого зацепления"
Хабаровск 2011
Исходные данные:
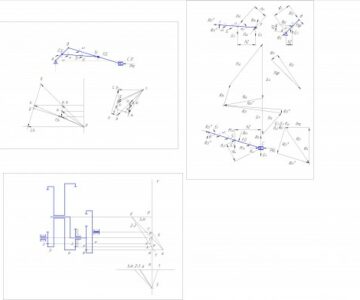
1. Анализ плоского рычажного шестизвенного механизма. Схема механизма, ОА = 0,08 м, ВС = 0,2 м, BS3 = 0,16 м, Ф1 = 0, η3 = 0,26 рад, µ3 = 0,52 рад, CD = 0,32 м, CS4 = 0,16 м, Xb = 0, Yb = -0,24 м, Yd = -0,04 м;
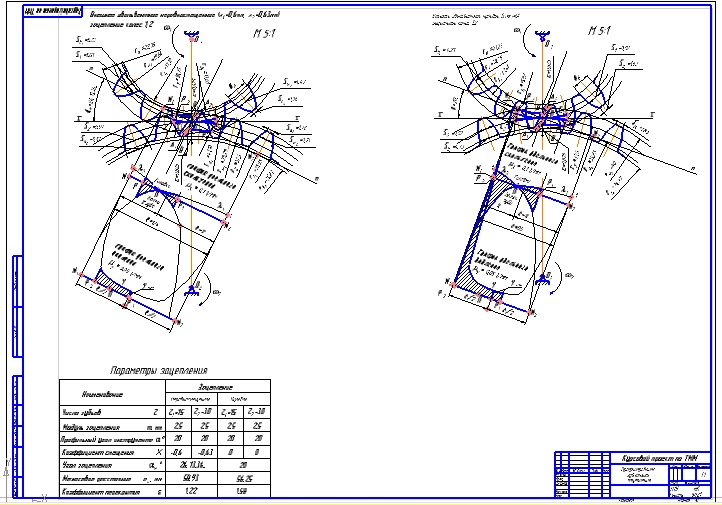
2. Синтез зубчатого зацепления. Модуль m = 10, межосевое расстояние aw = 111,5 мм, число зубьев (z1 = 9, z2 = 12), ha = 1, с = 0,25, α = 20 град.
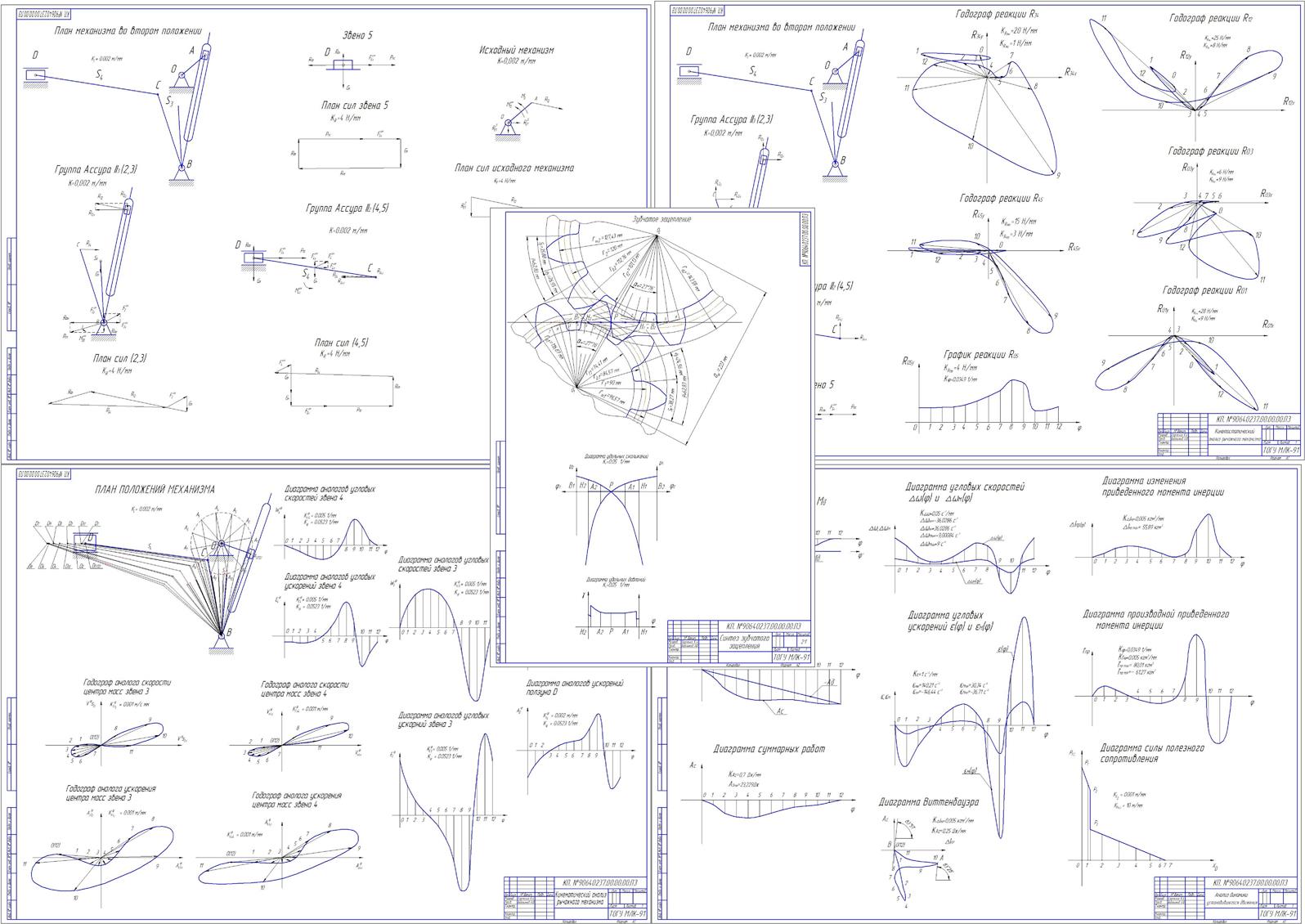
Курсовой проект включает в себя исследование рычажного шестизвенного плоского механизма и зубчатого зацепления.
Курсовой проект содержит: Лист 1 – «Кинематический анализ рычажного механизма» на формате А2; Лист 2 – «Динамический анализ рычажного механизма» на формате A2; Лист 3 – «Силовой анализ рычажного механизма» на формате А2; Лист 4 – «Силовой анализ рычажного механизма» на формате А2; Лист 5 – «Синтез зубчатого механизма» на формате А2; Приложения; 96 формулы; 9 таблиц; 14 рисунков.
Содержание
Введение
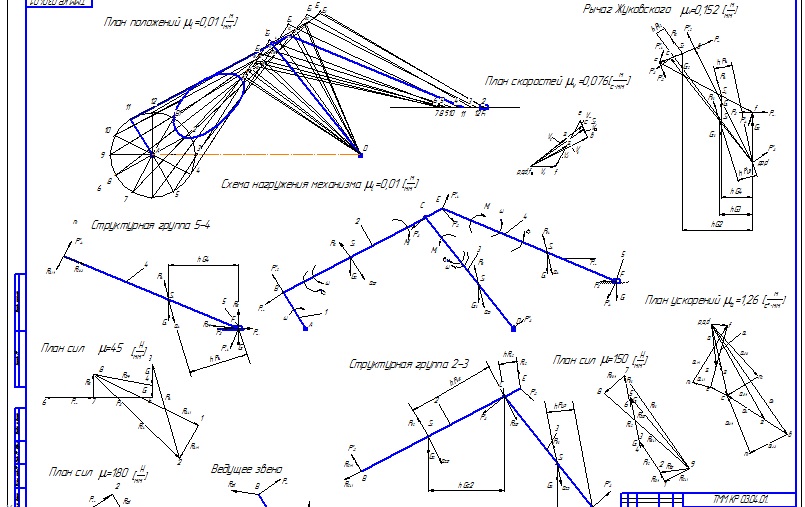
1. Исследование плоского рычажного шестизвенного механизма
1.1. Структурный анализ механизма
1.1.1. Анализ строения механизма на уровне звеньев и кинематических пар
1.1.2. Определение степени подвижности
1.1.3. Анализ строения механизма на уровне структурных групп
1.2. Кинематический анализ механизма
1.2.1. Анализ исходного механизма
1.2.2. Анализ группы Ассура 2-3
1.2.3. Анализ группы Ассура 4-5
1.2.4. Расчёт крайних положений
1.2.5. Расчёт кинематических параметров
1.2.6. Графическое оформление расчётов и анализ движения выходного звена
1.3. Анализ динамики установившегося движения
1.3.1. Формирование динамической модели машины
1.3.2. Определение закона движения входного звена
1.3.3. Расчет момента инерции маховика методом Виттенбауэра
1.3.4. Определение закона движения входного звена после установки маховика
1.3.5. Расчёт истинных параметров скоростей и ускорений
1.3.6. Графическое оформление расчётов
1.4. Кинетостатический анализ
1.4.1. Расчет сил, действующих на звенья
1.4.2. Кинетостатический анализ группы Ассура II2 (4-5)
1.4.3. Кинетостатический анализ группы Ассура II3 (2-3)
1.4.4. Кинетостатический анализ исходного механизма
1.4.5. Графическое оформление расчетов
2. Синтез зубчатого зацепления
2.1. Выбор коэффициентов смещения исходного контура
2.2. Расчет геометрических размеров колес
2.3. Определение качественных параметров зацепления
2.4. Графическое оформление расчётов
Заключение
Список используемой литературы
Приложения






Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности