Гомельский государственный технический университет им. П.О.Сухого
Кафедра "Техническая механика"
Курсовой проект по дисциплине "Теория механизмов и машин"
На тему: "Анализ технологической машины"
Гомель 2016
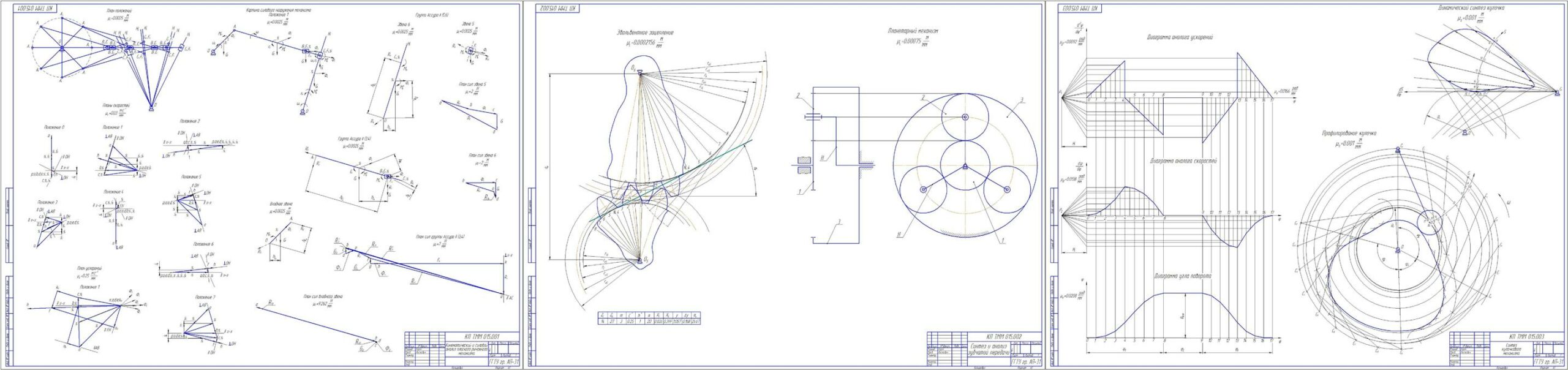
Исходные данные : дана кинематическая схема шестизвенного механизма: размеры звеньев( loa=0.12м; lab=0.3м; lbc=0.06м; ldh=0.315м; b=0.12м; a=0.12м), погонный вес (y=160H/м) и силой полезного сопротивления(F=1400H), угловая скорость входного звена (w=14c-1); дана схема кулачкового механизма с углами удаления(qy=118deg),возврата(qв=107deg) и дальнегостояния(qд=60deg); длинной коромысла(Lbc=0.15м) и максимального перемещения(Smax=38deg); дана схема зубчатого зацепления с указанием модуля (m=3) и числами зубьев(z5=14, z6=27); Дан трехфазный электродвигатель серии 4А,синхронная скорость 1000 об/мин.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ………………………………………………………………………….….5
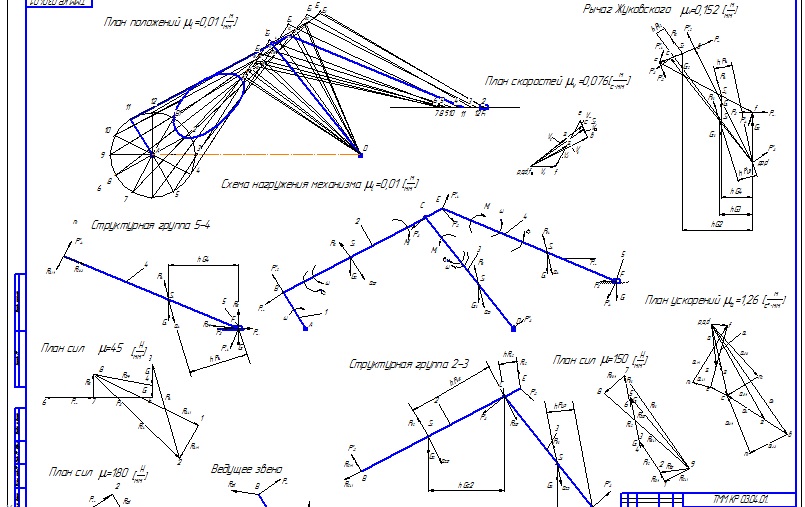
1 АНАЛИЗ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА…………………………...6
1.1 Структурный анализ рычажного механизма….………………………………….6
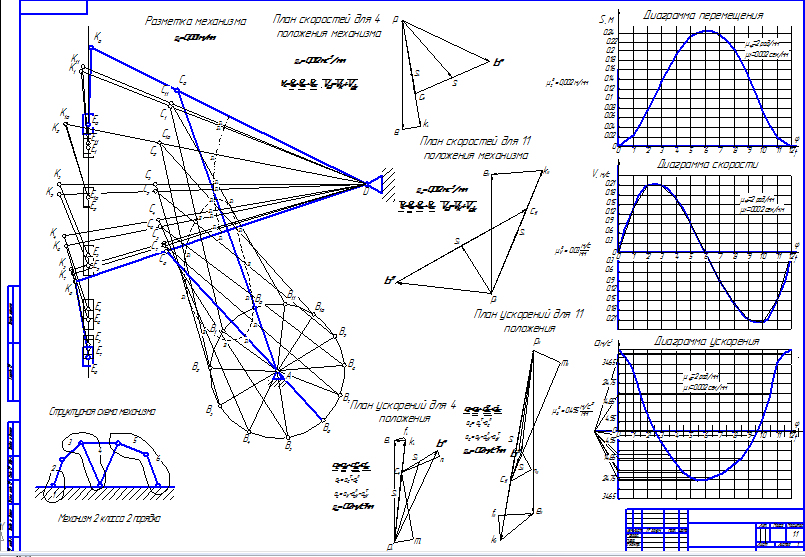
1.2 Кинематический анализ методом планов скоростей и ускорений.……………..8
1.2.1 Построение планов положений ……………………………………………....8
1.2.2 Построение планов скоростей…………………………………………...……8
1.2.3 Построение плана ускорений……………...………………………………...10
1.2.4 Кинематический анализ аналитическим методом……………………….…12
2 ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА………………………………...…20
2.1 Построение динамической модели…………………………………..…………..20
2.1.1 Определение приведенного момента сил полезного сопротивления……..20
2.1.2 Определение приведенного момента инерции…….……………………….21
2.2 Силовой расчет плоского шестизвенного механизма…………..……………...23
2.2.1 Построение картины силового нагружения механизма……………………23
2.2.2 Силовой расчет 2-ой группы Ассура………………………………………..24
2.2.3 Силовой расчет 1-ой группы Ассура………………………………………..25
2.2.4 Силовой расчет входного звена……………………………………………..27
3 СИНТЕЗ ЗУБЧАТОЙ ПЕРЕДАЧИ………………………..……………………….29
3.1 Геометрический расчет эвольвентной зубчатой передачи…………………..29
3.2 Построение картины эвольвентного зубчатого зацепления…….…………...30
3.3 Синтез планетарного механизма…………………………...……………….…32
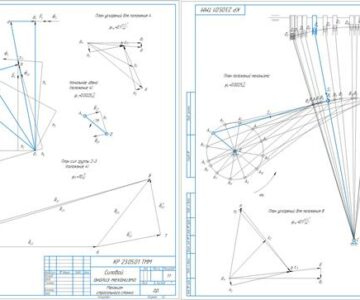
4 СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА………….……………………………34
4.1 Построение кинематических диаграмм движения…………………………...34
4.2 Определение основных размеров кулачкового механизма………………….36
4.3 Профилирование кулачка……………..……………………………………….37
ЗАКЛЮЧЕНИЕ………………………………………………………………………..38
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ………………………………....40
ПРИЛОЖЕНИЯ……………………………………………………………………….41





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности