Кубанский государственный аграрный университет
Факультет перерабатывающих технологий
Расчетно-графическая работа по дисциплине "Прикладная механика"
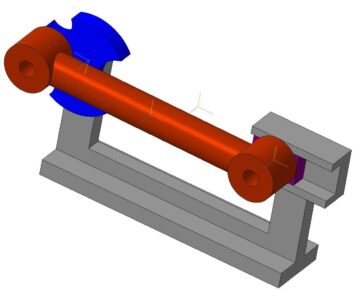
На тему "Исследование плоского шарнирно-ползунного механизма"
Краснодар 2014
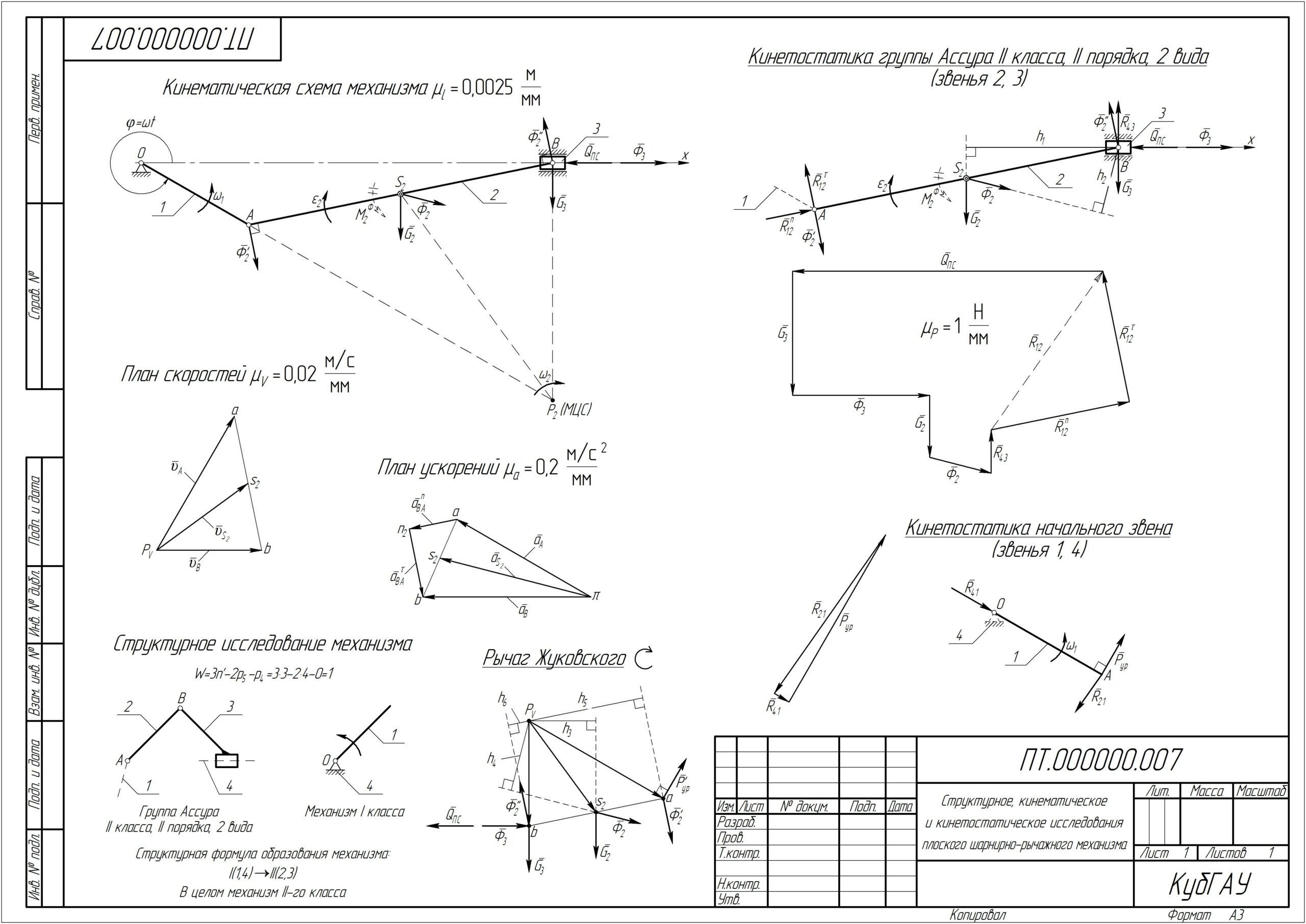
В данной работе проводятся исследования плоского кривошипно-шатунного механизма:
1) структурное - определяются степень подвижности механизма, число групп Ассура (их класс, порядок и вид), класс механизма, записывается структурная формула образования механизма;
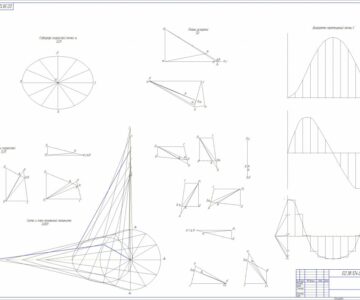
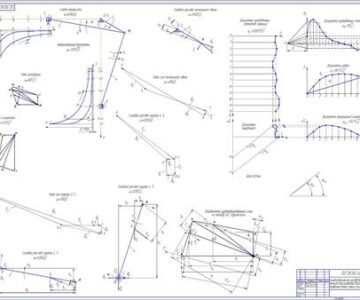
2) кинематическое - строятся планы скоростей и ускорений;
3) кинетостатическое - используя принцип Даламбера, к механизму прикладывается инерционная нагрузка и определяются реакции в кинематических парах методом планов сил; строится рычаг Жуковского.
Работа содержит поясняющие расчеты на 4 листах формата А4 и 1 лист графической части формата А3.
Указания к работе
Кривошип кривошипно-шатунного механизма, расположенного в вертикальной плоскости, вращается равномерно с заданной частотой.
Для заданного положения механизма необходимо провести структурное, кинематическое и динамическое исследования.
Положение механизма задается углом поворота кривошипа. Массой кривошипа пренебрегаем, считая его невесомым. Для шатуна заданы сила тяжести и момент инерции относительно оси, проходящей через центр масс этого звена и перпендикулярной к плоскости движения механизма. К ползуну, с заданной силой тяжести, приложена сила полезного сопротивления.
Сила полезного сопротивления задана в виде постоянной величины в пределах рабочего хода. При холостом ходе она равна нулю.
Ход механизма определяется направлением вектора скорости ползуна. Если вектор этот вектор направлен противоположно вектору силы полезного сопротивления, то это рабочий ход, а если сонаправлен – холостой ход.
Исходные данные (вариант 7): длины кривошипа (0,1 м) и шатуна (0,25 м); положение центра масс шатуна, угол поворота (330°) и частота вращения кривошипа (95,55 об/мин), сила полезного сопротивления (100 Н), силы тяжести шатуна (20 Н) и ползуна (40 Н), момент инерции шатуна (0,40 кг•м2).





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности