Уральский федеральный университет имени первого Президента России Б.Н.Ельцина
Кафедра: Детали машин
Курсовой проект по ТММ.
На тему: Анализ механизма сбрасыватель
Екатеринбург 2015
Исходные Данные:
Наименование параметра Обозначение и величина Размерность
Длина кривошипа ОА LOA =0.24 м
Длина звена AB LАВ=0.76 м
Длина кулисы BC LBC=0.66 м
Длина CD LCD=0.56 м
Длина звена DE LDE=0.80 м
а 0.30 м
b 0.90 м
c 0.80 м
Сила тяжести кривошипа ОА G_1 =100 H
Сила тяжести звена АВ G_2 =240 H
Сила тяжести коромысла BD G_3 =700 H
Сила тяжести звена DE G_4 =500 H
Сила тяжести ползуна E G_5 =780 H
Обороты в минуту n1=820 об/мин
Моменты инерции звеньев ISi относительно их центров тяжести IS1=0.30
IS2=0.26
IS3=0.48
IS4=0.35 кг*м2
Числа зубьев зубчатых колес Z3/Z4=13/41
Модуль зубчатых колес m=10 мм
Технологическое усилие, действующее на ползун Е при холостом движении ползуна усилие равно Q Q=2000 H
Угол зацепления α=20 ˚
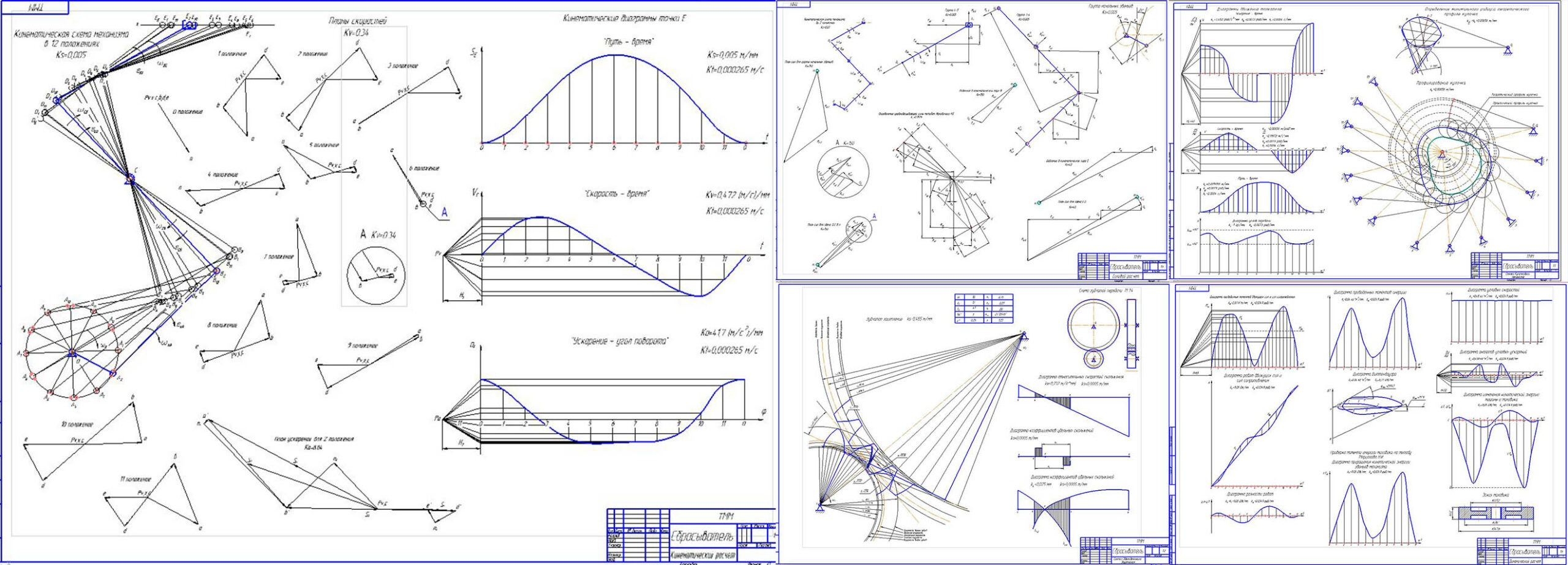
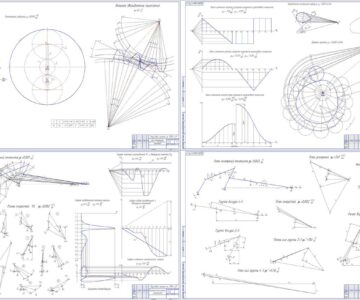
Курсовой проект по теории механизмов и машин содержит синтез рычажного, зубчатого и кулачкового механизмов и исследование, а также описание работы машинного агрегата. Рычажный механизм исследуется методами структурного, кинематического, силового и динамического анализа.
Оглавление
Введение 3
1.Структурный анализ механизма. 5
2.Кинематический анализ механизма методом построения планов скоростей и ускорений. 6
2.1. Построение положений звеньев 6
2.2. Определение скоростей звеньев механизма 7
2.2. Определение ускорений точек звеньев механизма. 8
2.3. Кинематический анализ механизма методом построения кинематических диаграмм. 10
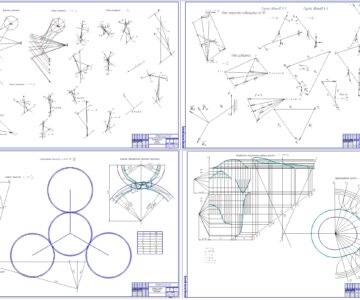
3. Силовой анализ механизма. 11
3.1 Определение сил, действующих на звенья механизма. 11
3.2. Определение реакций в кинематических парах. 12
3.3. Проверку выполняем по методу Жуковского Н.Е. 14
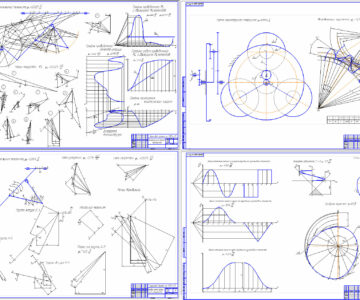
3. Синтез эвольвентного зубчатого зацепления. 15
3.1. Геометрические параметры зацепления. 15
3.2. Качественные показатели зацепления. 17
4. Динамический синтез кулачкового механизма. 18
5. Динамический расчет механизма 20
5.1. Приведение сил, построение диаграммы работ и их разностей. 20
5.2. Приведение моментов инерции 23
5.3 Расчет маховика. 24
5.4 Проверка величины махового момента инерции маховика 25
по методу Мерцалова. 25
6. Определяем угловую скорость главного вала машины. 26
Заключение. 27
Список используемой литературы. 28





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности