Исходные данные:
Размеры коромысла: lBE = 0,5 м.
Угол размаха коромысла ψ = 37°.
Расположение направляющей стойки, по которой перемещается ползун:
Входное звено – кривошип.
Коэффициент изменения средней скорости входного звена к = 1,16.
Максимальные углы давления в кинематических парах:
в паре В max = 43°, в паре D max = 23°.
содержание
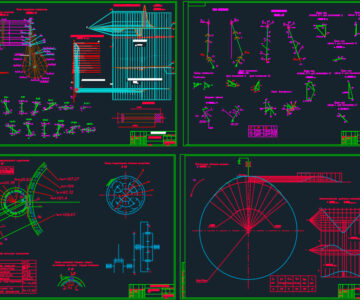
1 структурный анализ и геометрический синтез рычажного механизма
1.1 Исходные данные……………………………………………………………4
1.2 Структурный анализ рычажного механизма……………………………..5
1.3 Определение недостающих размеров звеньев…………………………….7
1.4 Определение направления вращения кривошипа…………………………9
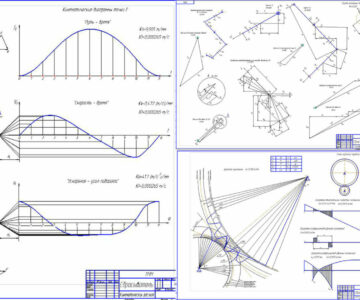
2 кинематический анализ рычажного механизма
2.1 Исходные данные………………………………………………………….10
2.2 Подготовка данных для введения в ЭВМ……………………………….10
2.3 Описание работы ЭВМ……………………………………………………11
2.4 Анализ результатов вычислений…………………………………………11
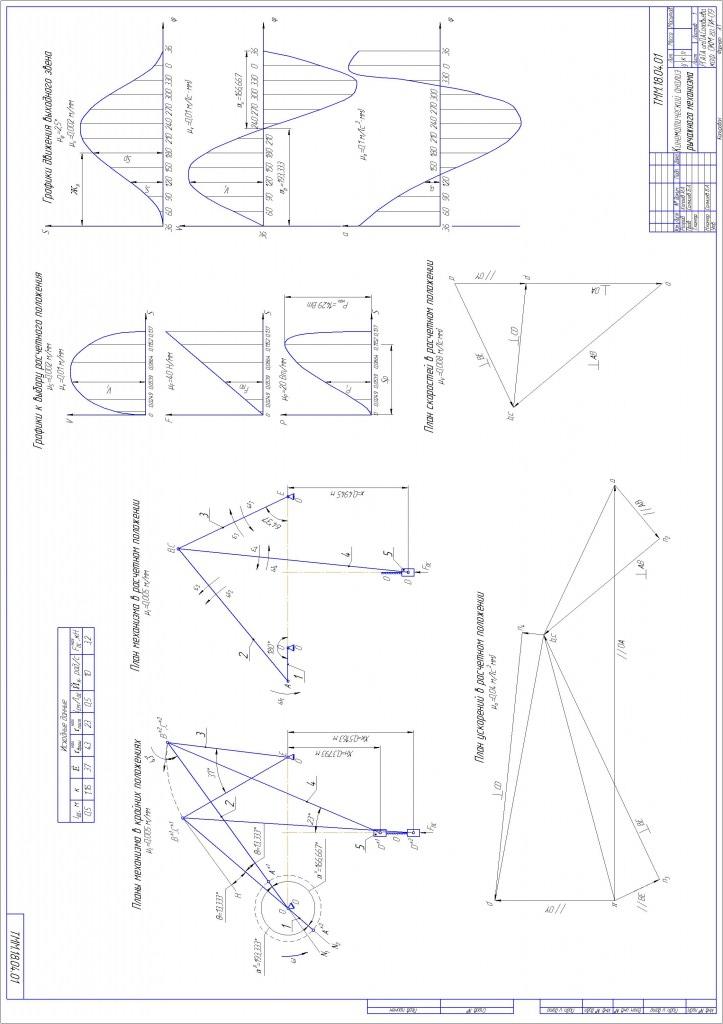
2.5 Определение расчетного положения механизма…………………………16
2.6 Построение плана механизма в расчетном положении…………………17
2.7 Определение линейных и угловых скоростей графоаналитическим методом……………………………………………………………………………….....19
2.8 Определение линейных и угловых ускорений графоаналитическим методом……………………………………………………………………………….....21
3 силовой анализ рычажного механизма
3.1 Исходные данные…………………………………………………………..24
3.2 Определение активных силовых факторов и инерционной нагрузки на звенья…………………………………………………………………………………….24
3.3 Силовой расчет структурной группы 4–5………………………………..26
3.4 Силовой расчет структурной группы 2-3………………………………...27
3.5 Силовой расчет звена 2…………………………………………...............29
3.6 Силовой расчет входного звена…………………………………………….29
3.7 Проверка с помощью рычага Жуковского…………………………………30
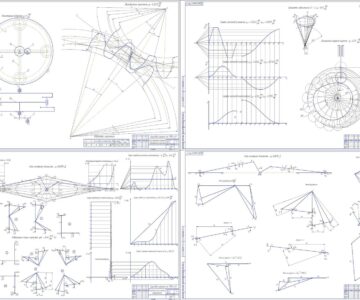
4 синтез и кинематический расчёт зубчатого зацепления
4.1 Исходные данные…………………………………………………………..32
4.2 Определение неизвестного числа зубьев одного из колёс………………33
4.3 Кинематический расчет механизма аналитическим методом…………...33
4.4 Кинематический расчет механизма графическим методом……………...35
5 синтез зубчатого зацепления
5.1 Исходные данные…………………………………………………………..38
5.2 Геометрический расчет зубчатого зацепления…………………………..38
5.3 Вычисление качественных показателей зубчатого зацепления………….43
5.4 Построение картины зацепления…………………………………………..44
6 динамический синтез кулачкового механизма
6.1 Исходные данные……………………………..……………………………..45
6.2 Построение графиков движения толкателя………………………………..46
6.3 Определение радиуса основной шайбы……………………………………47
6.4 Построение профиля кулачка………………..…………………………….48
Список использованных источников…………………………………………………..50
сдал на 5)





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности