Министерство образования Республики Беларусь
Учреждение образования
Брестский государственный технический университет
Кафедра машиноведения
Курсовой проект по теории механизмов, машин
и манипуляторов
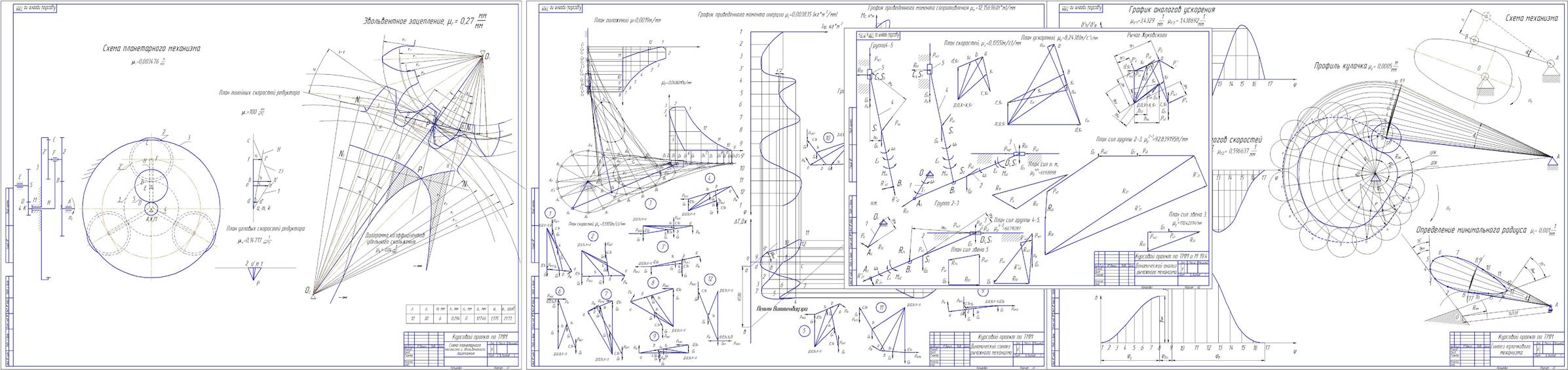
Тема: Механизмы компрессора
Вариант №11
Брест 2016
Исходные данные
Lab=Ls2c=0,35 м ;Loa=0,095 м; Lcs4=Lbs4; Las2=Lds2
частота вращения кривошипа и колеса 1: n1=1090 мин-1;
Коэфф. неравномерности движения: 1/80
Диаметры поршней: 0,08 мм
Макс.индикаторное давление: 3,4 Мпа
Момент инерции кривошипа: 0,075
Номер пол. для силового расчета: 5
Макс. ход толкателя в кулачковом мех. : 19
Длина коромысла: 135 м
Фазовые углы поворота кулачка: фаза подъема 95°, фаза верхнего выстоя 20°, фаза возврата 150°, рабочая фаза 275°
Допускаемый угол давления: 35°
модуль зубчатого колеса m=6 мм; число зубьев колеса: z1=12; z1=30;
Передаточное решение редуктора: 5/19
Содержание
Схема механизмов………………………………………………………………………………………...4
1 Структурный анализ механизма……………………………………………………………………..5
1.1 Структурный анализ рычажного механизма………………………………………………………..5
1.2 Структурный анализ кулачкового механизма..………………………………………………………8
1.3 Структурный анализ планетарного механизма ………………………………………………........9
2 Динамический анализ рычажного механизма…………………………………………………..10
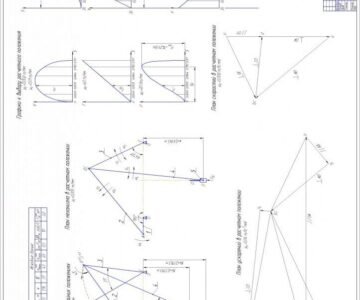
2.1 Планы положений механизма……………………………………………………………………….….10
2.2 Построение повернутых планов скоростей……………………………………………………...10
2.3 Определение значений скоростей точек и звеньев механизма……………………………….....12
2.4 Угловые скорости звеньев……………………………………….…………...…………………………13
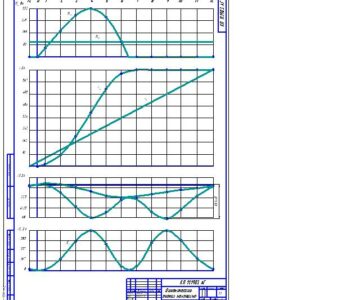
2.5 Определение приведенной силы………………………………………………………………………...14
2.6 Определение приведенного момента инерции…………………………………....………………...18
2.7Построение графиков………………………………………………………….………………………....21
3 Силовой расчет рычажного механизма…………………………………………………………....24
3.1 Определение ускорений…………………………………………………………………………………..24
3.2 Определение значений ускорений………………………………………………………………………26
3.3 Определение угловых ускорений звеньев……………………….……………………………………..27
3.4 Силовой расчёт…………………………………..………………………………………………………..28
3.5 Определение уравновешивающей силы по методу Жуковского...……………………………….32
4 Проектирование кинематической схемы планетарного редуктора и расчёт
эвольвентного зацепления …………………………………………………….….........................…33
4.1 Подбор числа зубьев и числа сателлитов планетарного редуктора ………………….…….33
4.2 Построение плана скоростей и картины угловых скоростей ………………………………....34
4.3 Расчёт параметров зацепления зубчатых колёс …………………………………………………..36
4.4 Определение коэффициента относительного скольжения………………………………………38
4.5Определение коэффициента перекрытия зубчатой передачи графическим и аналитическим способом….…………………………………………………………………...……….39
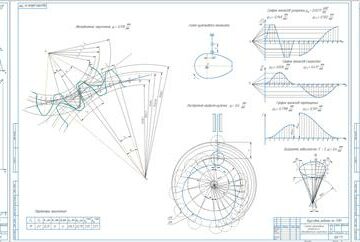
5 Синтез кулачкового механизма…………………….............................................……………….40
5.1 Построение графиков аналогов скоростей, ускорений и перемещений…….………………..40
5.2 Определение Rmin, построение профиля кулачка……………………………………………………41
Список литературы………………………………………………………………………………………....43





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности