«Владимирский государственный университет имени
Александра Григорьевича и Николая Григорьевича Столетовых»
Кафедра машиноведения
Курсовая работа по дисциплине «Теория машин и механизмов»
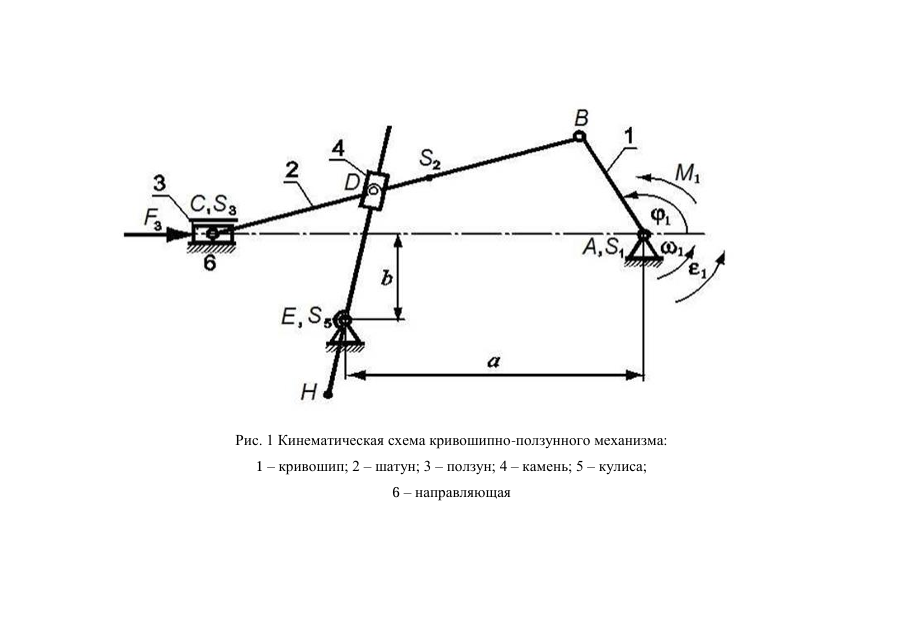
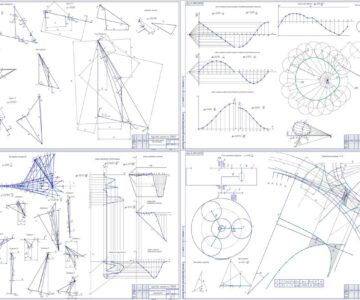
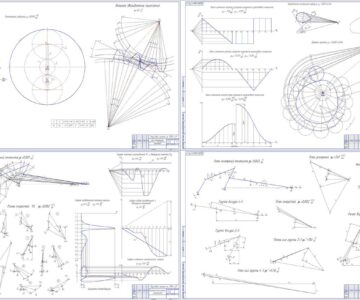
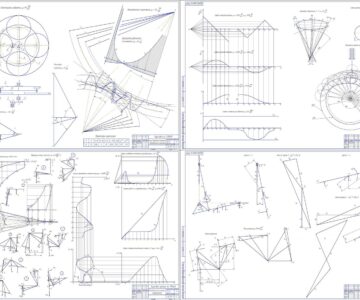
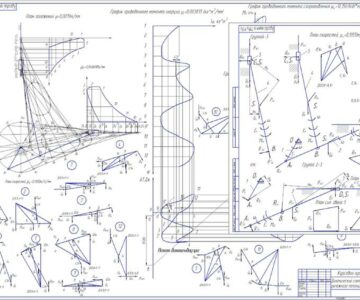
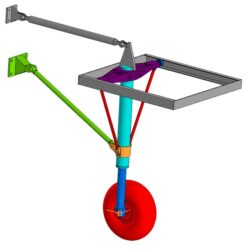
Тема: "Анализ кривошипно-ползунного механизма
с простыми кинематическими парами"
Владимир 2022
Данные для исследования механизма:
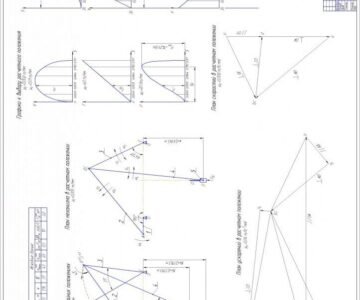
φ1=45°; Lab=0,07 м; Lbс=0,21 м; Lbс=0,21 м; Lbd=0,5 Lbс; Leh=a=0,14 м; Lbs2=b=0,5 Lab; ω1=20рад/с; ε1=0 рад/с2; m1=20 кг; m2=15 кг; m3=30 кг; m5=24 кг; J1s=3 кг*м2; J2s=0,35 кг*м2; J5s=0,18 кг*м2; F3=3500H. чертёж механизма приложен на фото.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ .........................................................................................................................2
1 Кинематический анализ механизма.............................................................................3
1.1 Структурное исследование механизма.....................................................................3
1.2 Построение кинематической схемы механизма......................................................5
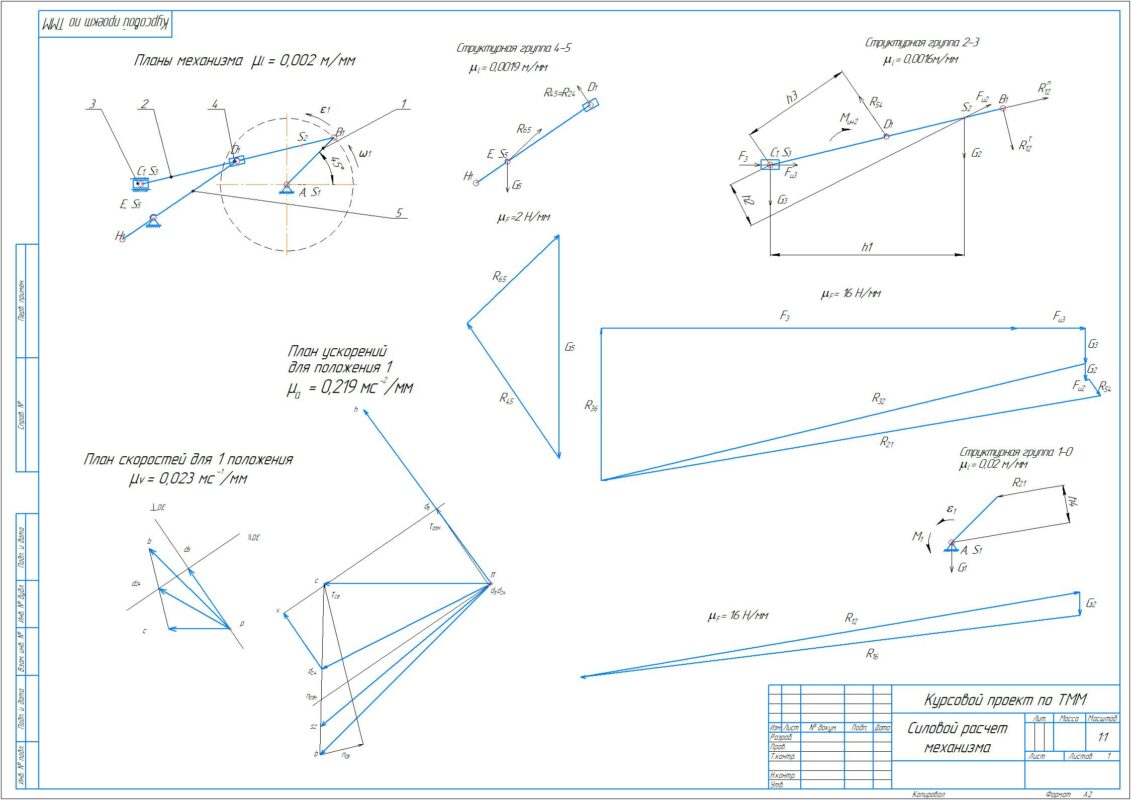
1.3 Построение планов скоростей механизма................................................................6
1.4 Построение плана ускорений для заданного положения механизма при φ_1=45° .............................................................................................................................................9
2 Силовой анализ механизма .....................................................................................14
2.1 Определение сил инерции, моментов сил инерции, действующих на механизм, весов звеньев механизма .............................................................................................14
2.2 Силовой расчет структурных групп только для заданного положения механизма при φ_1=45° .................................................................................................15
2.2.1 Структурная группа из звеньев 4-5 ......................................................................15
2.2.2 Структурная группа из звеньев 2-3 ..................................................................16
2.2.3 Силовой расчет ведущего звена механизма (кривошип AB).............................16
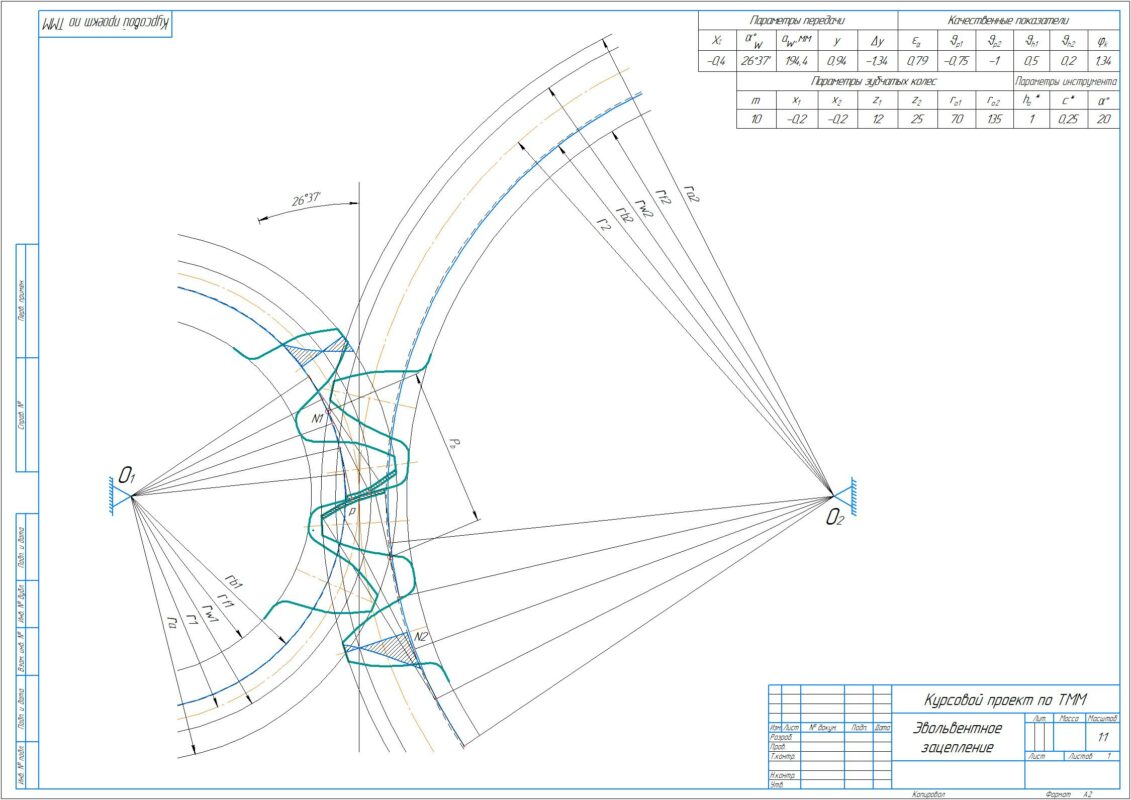
3 Эвольвентное зацепление .........................................................................................18
Список используемой литературы .............................................................................21



Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности