КФ МГТУ им. Н.Э.Баумана
Кафедра теории машин и механизмов
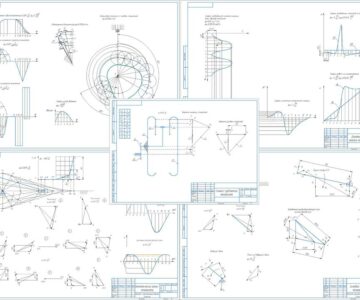
Курсовой проект по дисциплине "Проектирование и исследование механизмов гидравлического подъемника автомобиля-самосвала"
Калуга 2016
Максимальный угол поворота платформы 3
Координаты шарнира В=50 а=0,6 b=0,15
Расстояние от шарнира В до центра масс S_3платформы 3
0,1
Начальное значение расстояния от S_3 до центра масс S_4 груза 4
0,25
СОДЕРЖАНИЕ
1. Введение……………………………………………………………………6
1.1. Проектирование и исследование механизмов поворотного стола формовочной машины……………………………………………………………6
1.2. Исходные данные для расчета……………………………………………....8
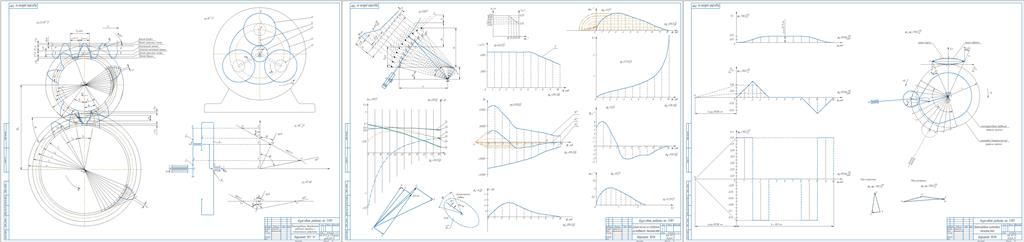
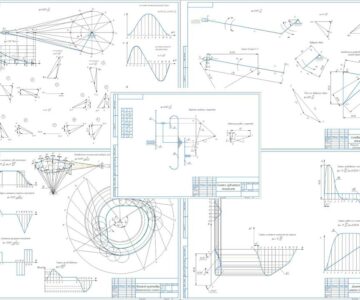
2. Лист I: Синтез эвольвентной зубчатой передачи и планетарного редуктора………………………………………………………………………....9
2.1. Проектирование зубчатой передачи………………………………………..9
2.1.1. Цель…………………………………………………………………..9
2.1.2. Исходные данные и постановка задачи…………………………....9
2.1.3. Расчет эвольвентной зубчатой передачи…………………………..9
2.1.4. Построение проектируемой зубчатой передачи и построение эвольвенты……………………………………………………………………….11
2.1.5. Графическое определение коэффициента перекрытия………….12
2.1.6. Станочное зацепление……………………………………………..12
2.1.7. Выводы…………………………………………………………….. 13
2.2. Проектирование планетарного редуктора………………………………...13
2.1.1. Цель…………………………………………………………………13
2.2.2. Исходные данные и постановка задачи…………………………..13
2.2.3. Основные условия проектирования многосателлитного двухрядного планетарного редуктора…………………………....……………13
2.2.4. Подбор чисел зубьев двухрядного планетарного редуктора…...13
2.2.5. Графическая проверка передаточного отношения……………...15
2.2.6. Выводы…………………………………………………………….16
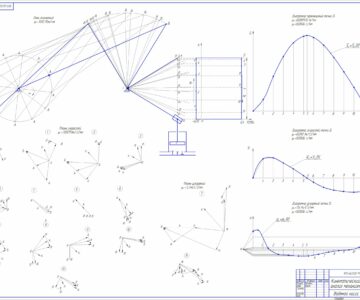
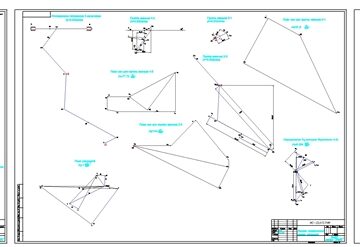
3. Лист II: Динамическое исследование основного механизма…………….17
3.1. Цель……………………………………………………………………………………………………………17
3.2. Исходные данные и постановка задачи……………………………………………………17
3.3. Геометрический синтез механизма………………………………………………………….18
3.3.1. Порядок расчета……………………………………………………………………………18
3.3.2. Синтез механизма…………………………………………………………………………19
3.3.3. Результаты расчета……………………………………………………………………….19
3.4. Динамическая модель……………………………………………………………………………….19
3.4.1. Определение суммарного приведенного момента сил……………..20
3.4.2. Метод приведения масс и моментов инерции……………………………20
3.5. Передаточные функции…………………………………………………………………………..21
3.6. Приведенный суммарный момент инерции механизма…………………………24
3.7. Суммарный приведенный момент сил полезного сопротивления…………24
3.8. Измерение действующей силы F……………………………………………………………...25
3.8.1. Порядок расчета……………………………………………………………………………25
3.8.2. Результаты расчета……………………………………………………………………….26
3.9. Приведенный момент движущей силы и суммарный приведенный момент сил……………………………………………………………………………………………………….27
3.10. Диаграмма суммарной работы……………………………………………………………….27
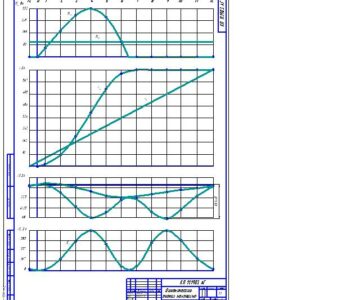
3.11. Определение закона движения начального звена механизма…………….28
3.12. Время работы механизма……………………………………………………………………….28
3.13.Определение закона движения начального звена…………..................…….29
3.14. Выводы…………………………………………………………………………………………………….31
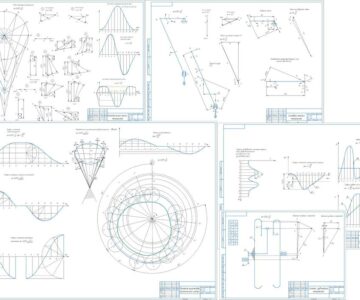
4. Лист III: Проектирование кулачкового механизма………………...32
4.1. Цель………………………………………………………………………......32
4.2. Исходные данные и постановка задачи…………………………………… 32
4.3. Построение кинематических диаграмм…………………………………… 32
4.4. Построение вспомогательной диаграммы………………………………... 33
4.5. Профилирование кулачка………………………………………………….. 34
4.6. проверка передаточных функций………………………………………… .35
4.6.1. Построение заменяющего механизма……………………………. 35
4.6.2. Проверка передаточной функции скорости……………………… 35
4.6.3. Проверка передаточной функции ускорения……………………. .36
4.7. Выводы……………………………………………………………………… 37





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности