Московский Государственный Технический Университет им. Баумана
Факультет «Робототехники и комплексной автоматизации»
Кафедра РК2 «Теории механизмов и машин»
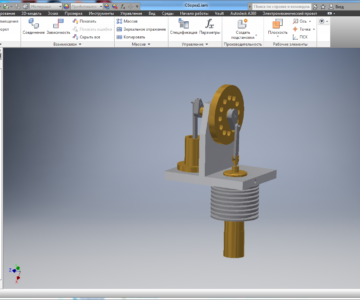
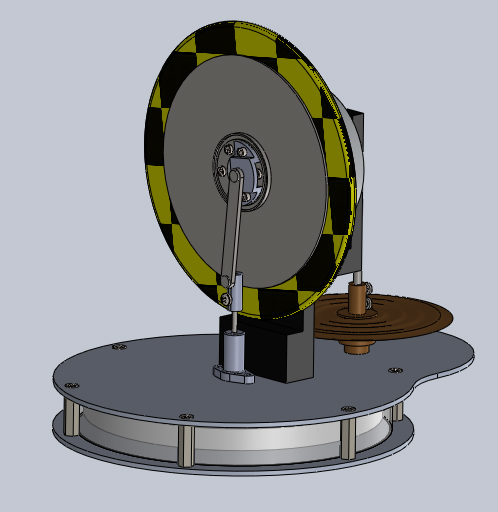
Курсовой проект на тему:«Проектирование и исследование механизмов судовой силовой установки с двигателем Стирлинга»
Задание №118а
Москва 2017
Расчетно-пояснительная записка содержит 46 страниц формата А4, 4 листа формата А1 и 9 таблиц.
В курсовой работе выполнено проектирование двигателя Стирлинга для судовой силовой установки. Проведено:
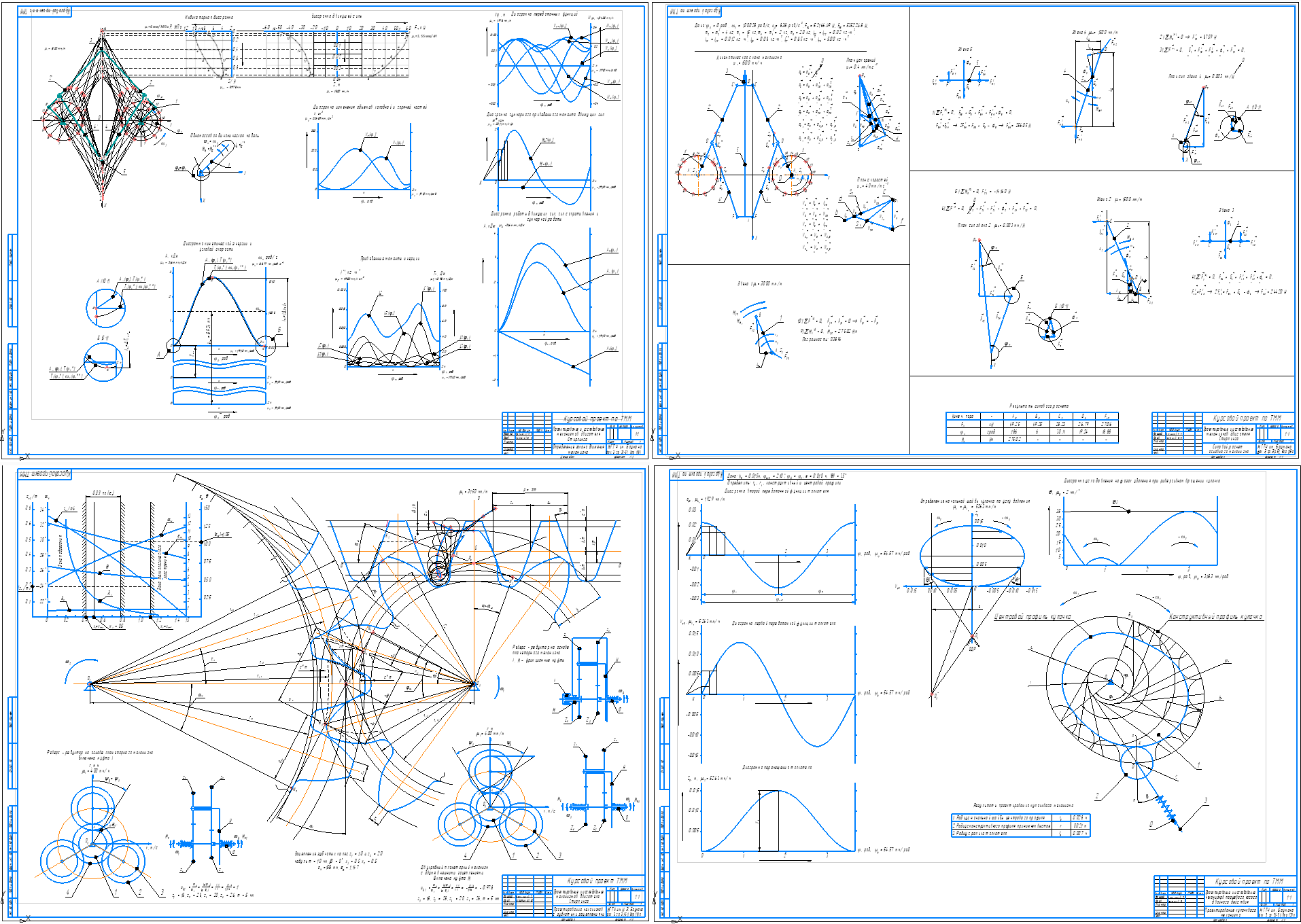
- проектирование ромбического механизма и определен закон его движения;
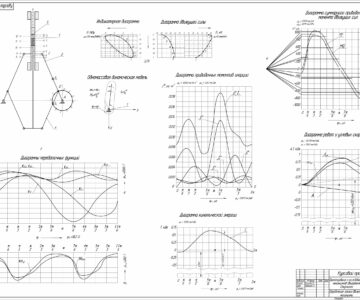
- силовой расчет ромбического механизма;
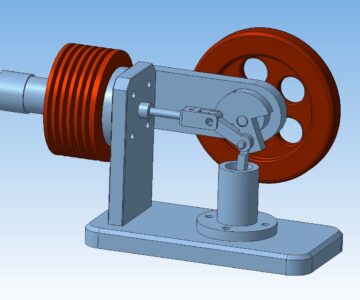
- проектирование цилиндрической эвольвентной прямозубой зубчатой передачи и однорядного планетарного редуктора;
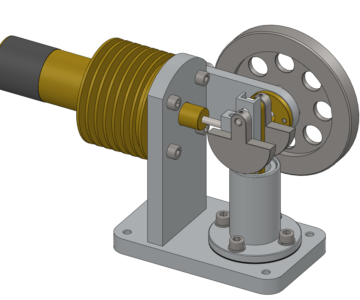
- проектирование кулачкового механизма.
Техническое задание 4
1. Определение закона движения основного механизма двигателя Стирлинга 10
1.1. Определение размеров ромбического механизма 10
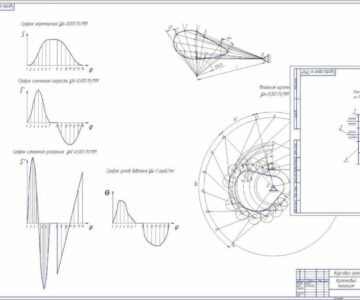
1.2. Построение индикаторной диаграммы и диаграммы сил 10
1.3. Расчет кинематических передаточных функций 11
1.4. Построение диаграммы суммарного приведенного момента и работы 14
1.5. Построение диаграммы полной кинетической энергии всех звеньев, приведенного момента инерции и приближенной диаграммы кинетической энергии второй группы звеньев 16
1.6. Построение приближенной диаграммы кинетической энергии первой группы звеньев и определение закона движения механизма 18
1.7. Графики изменения объемов холодной и горячей полостей двигателя Стирлинга. 21
2. Силовой расчет
2.1. Построение плана скоростей и ускорений для заданного положения 22
2.2. Определение главных векторов и главных моментов сил инерции 24
2.3. Силовой расчет механизма 29
3. Проектирование зубчатой передачи и планетарного механизма 29
3.1. Геометрический расчёт эвольвентной зубчатой передачи внешнего зацепления 29
3.2. Выбор коэффициента смещения с учетом качественных показателей работы зубчатой передачи 36
3.3. Построение станочного зацепления 37
3.4. Построение проектируемой зубчатой передачи 39
3.5. Проектирование реверс – редуктора на основе планетарного механизма 40
4. Проектирование кулачкового механизма 42
4.1. Построение кинематических диаграмм методом графического интегрирования 42
4.2. Определение основных размеров кулачкового механизма 44
5. Заключение 45
6. Список литературы 46





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности