Санкт-Петербургский государственный университет растительных полимеров
Кафедра основы конструирования машин
Курсовой проект по дисциплине: "Теория машин и механизмов"
На тему: "Расчет механизмов гайковырубного автомата"
Санкт-Петербург 2015
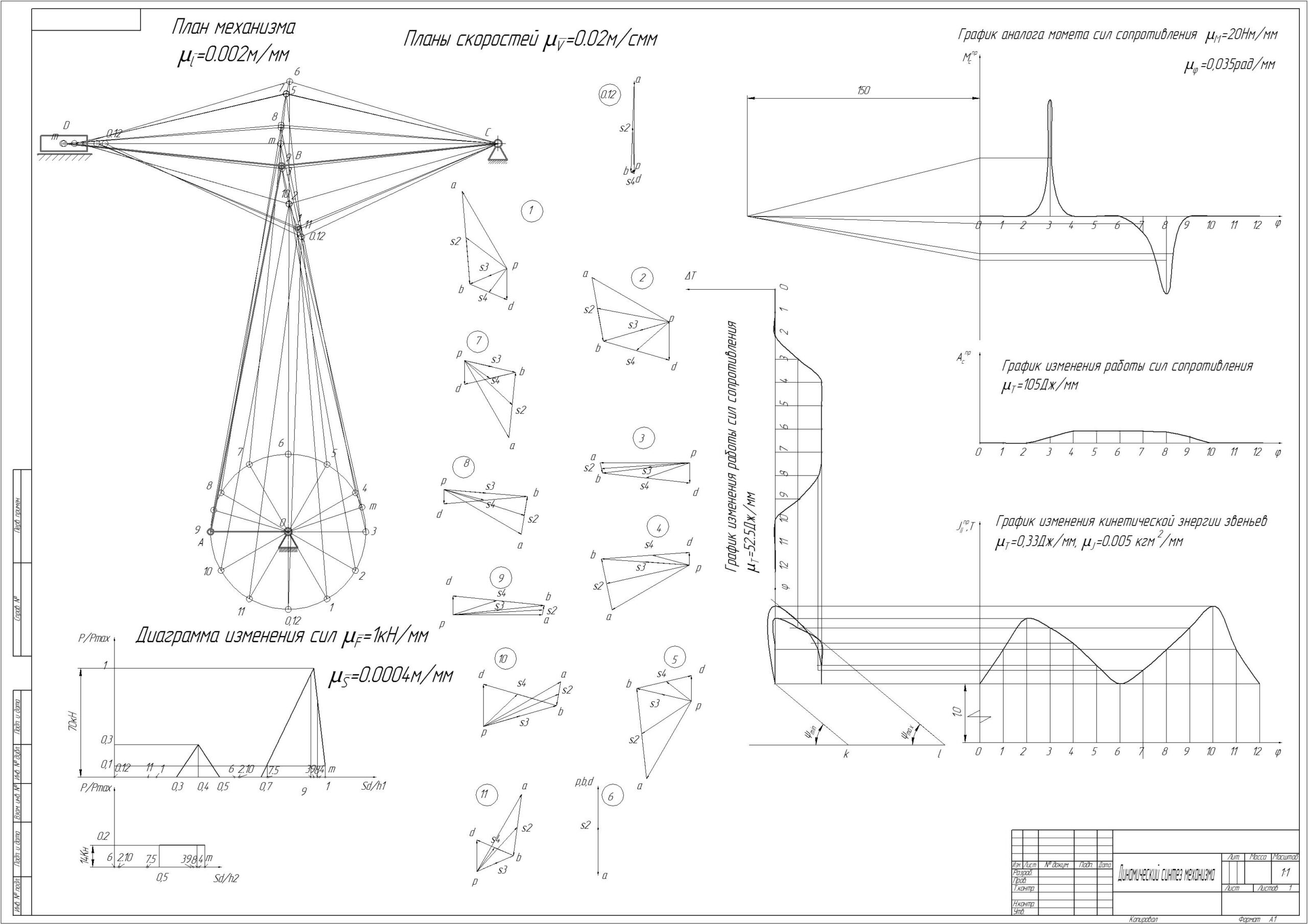
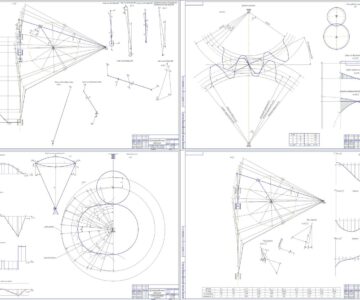
Исследуемый механизм, кинематическая схема, служит для преобразования вращательного движения кривошипа (входное звено) в поступательное движение ползуна (выходное звено).
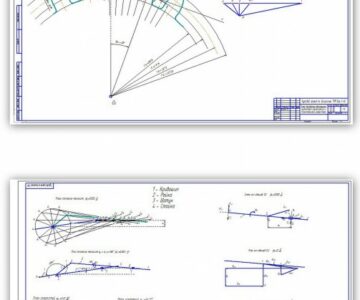
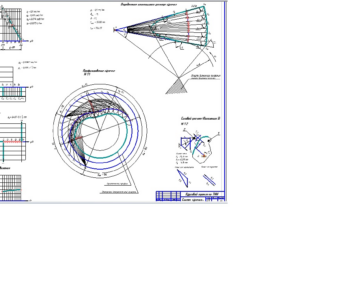
Графическая часть содержит : Динамический синтез механизма, Силовой анализ механизма, Синтез зубчатого механизма, Синтез кулачкового механизма
Курсовой проект содержит 4 чертежа А1, пояснительную записку из 39 страниц,
Технические характеристики
Расстояние по горизонтали между точками O и C a 0.27 м
Высота точки C над точкой O b 0.5
Длина кривошипа 1 LOA 0.1
Длина шатуна 2 LAB 0.48
Длина коромысла 3 LBC 0.28
Длина шатуна 4 LCD 0.28
Частота вращения кривошипа n1 110 Об/мин
Частота вращения лвигателя nд 960 Об/мин
Коэффициент неравномерности вращения кривошипа 1/8 -
Сила полезного сопротивления Pп.с. 70 кН
Массы:
кривошипа 1 m1 60
кг
шатуна 2 m2 12
Коромысла 3 m3 16
Шатуна 4 m4 16
Ползуна 5 m5 56
Моменты инерции
кривошипа 1 Js1 1,6 кг*м2
шатуна 2 Js1 0,28
Коромысла 3 ,Шатуна 4 Js4 =Js3 0,12
Двигателя Jдв 0,05
Зубчатный механизм
Модуль колес планетарного редуктора mp 5 мм
Число зубьев шестерни а Za 13
Число зубьев колеса b zb 19
Кулачковый механизм
Фаза опускания и подъема φо=φп 55 Град
Фаза дальнего встоя φв 130 Град
Ход толкателя h 0.017 м
Угол давления υ 27 град



Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности