Белорусско-Российский университет
Кафедра технология машиностроения
Курсовая работа по дисциплине "Автоматизация производственных процессов"
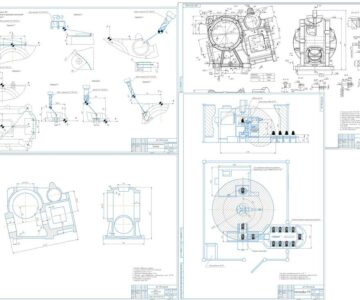
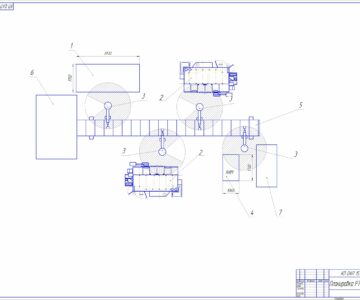
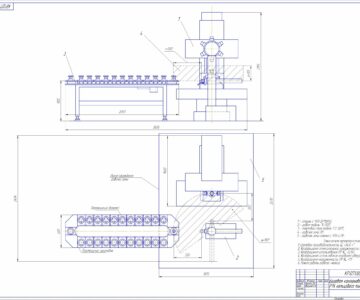
На тему: "Разработка роботизированного технологического комплекса для обработки детали"
Могилёв 2021
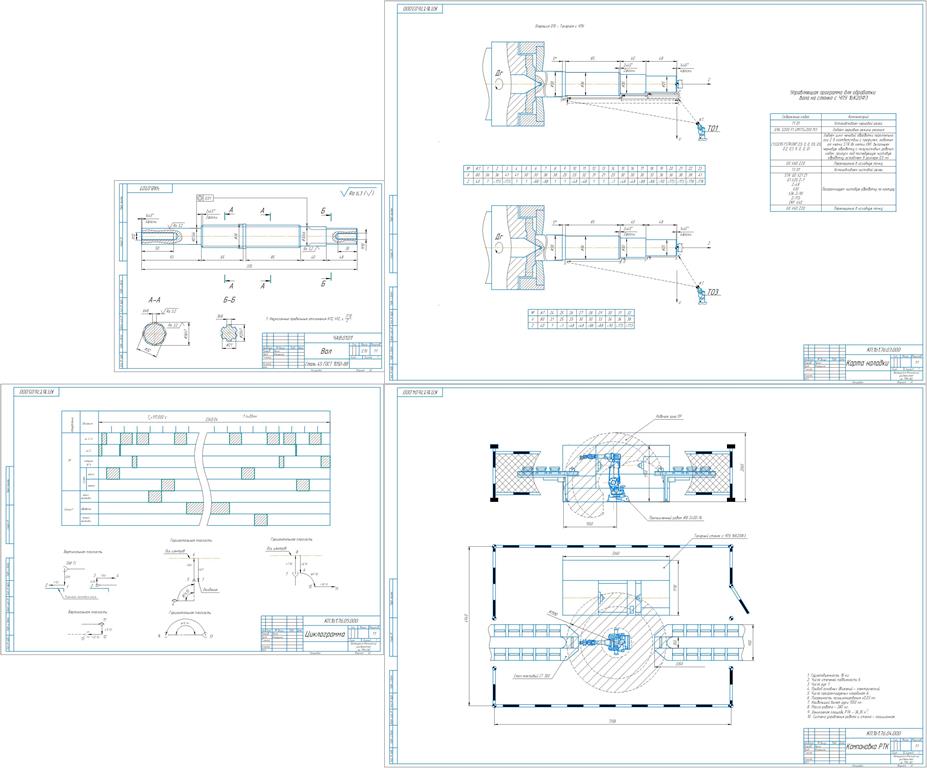
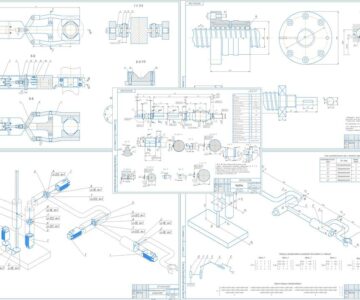
Вал предназначен для передачи крутящего момента.
Поверхности Ø25k6 и Ø30k6 предназначены для подшипников. Точность размеров поверхностей обеспечивается по 6-му квалитету точности, т.к. подшипник имеет класс точности 0. Для того чтобы избежать перекоса подшипников при запрессовке и повышенного шума и вибрации при работе, данные шейки должны иметь допуск соосности не более 0,01 мм.
Исходные данные:
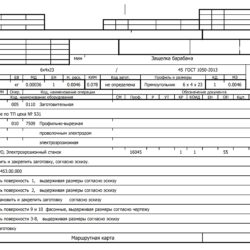
1. Деталь: вал(качестве материала выбрана Сталь 45 ГОСТ 1050-88).
2. Заготовка: прокат.
3. Выбран промышленный робот модели “IRB 2400-16”.
Содержание:
Введение
1.Описание детали
1.1 Назначение и конструкция детали
1.2 Анализ технологичности конструкции детали
1.3 Определение типа производства
1.4. Метод получения заготовки
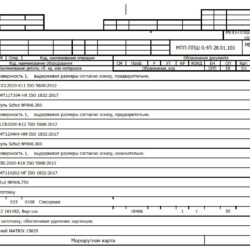
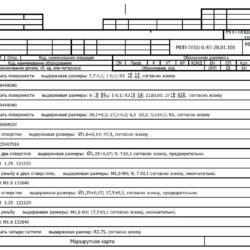
1.5 Разработка маршрутного техпроцесса изготовления детали
1.5.1 Маршрутный техпроцесс изготовления вала-шестерни
1.6 Проектирование операции
1.6.1Выбор станка
1.6.2 Выбор системы координат детали и инструмента
1.6.3 Расчет режимов резания и времени выполнения операции
2. Конструкторское проектирование
2.1 Выбор промышленного робота (ПР)
2.2 Выбор вспомогательного оборудования
2.3 Выбор компоновки РТК
2.4 Построение и расчет элементов траектории захватного устройства промышленного робота
2.5 Расчет допустимых скоростей перемещения заготовки (детали)
2.6 Построение циклограммы РТК
2.7 Расчет показателей РТК
Заключение
Список используемых источников
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности