«Омский Государственный Технический Университет»
Кафедра Автоматизации и робототехники
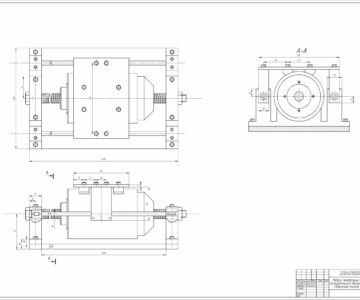
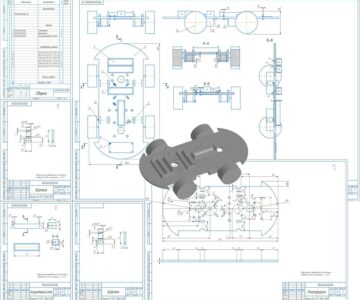
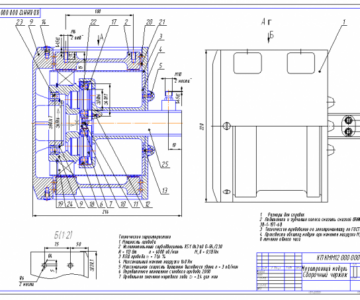
Бакалаврская работа на тему: Мехатронное устройство с двумя поступательными и одной вращательной кинематической парой
В работе выполняются следующие поставленные задачи:
1. Разработка динамической модели манипулятора.
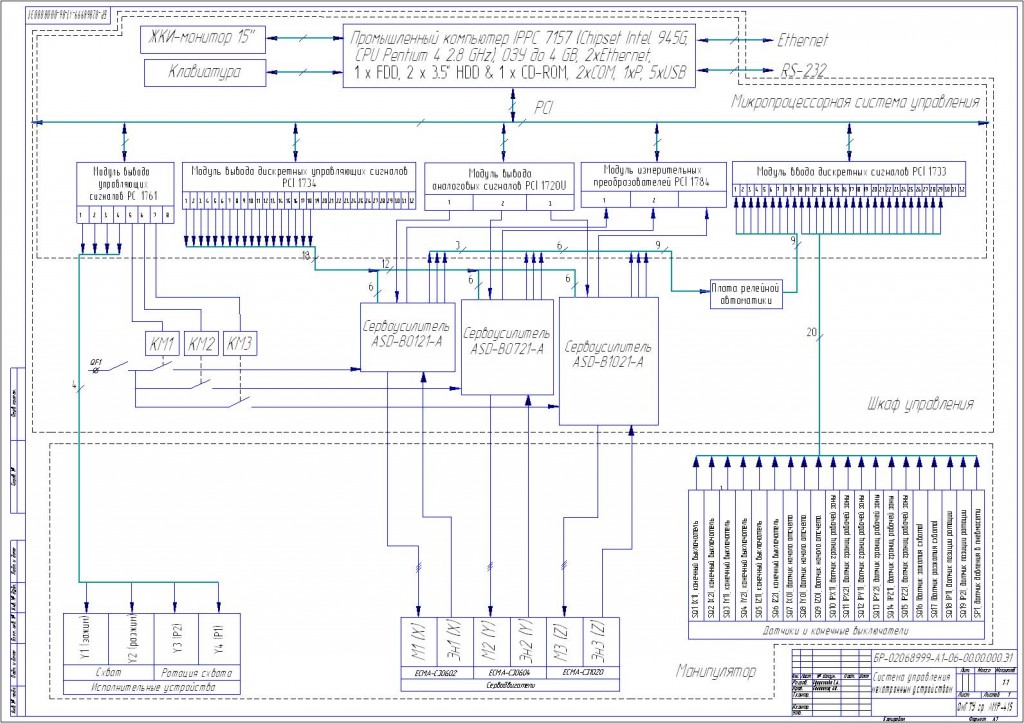
2. Разработка структурной схемы системы централизованного контурного управления.
3. Выбор элементной базы и подбор соответствующих электронных компонентов для разрабатываемой системы управления.
Задание на ВКР (перечень подлежащих разработке разделов):
Введение, Рабочая зона схвата мехатронного устройства, Проектировочный расчет мощностей приводов, Разработка структурной схемы микропроцессорной системы управления мехатронным устройством, Разработка принципиальной электрической схемы соединений, Заключение
Перечень графического материала с указанием основных чертежей и (или) иллюстративного материала:
чертеж исходных данных и рабочей зоны мехатронного устройства, чертеж динамической модели мехатронного устройства, чертеж структурной схемы системы управления, чертеж принципиальной электрической схемы системы управления.
Омск 2012

Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности