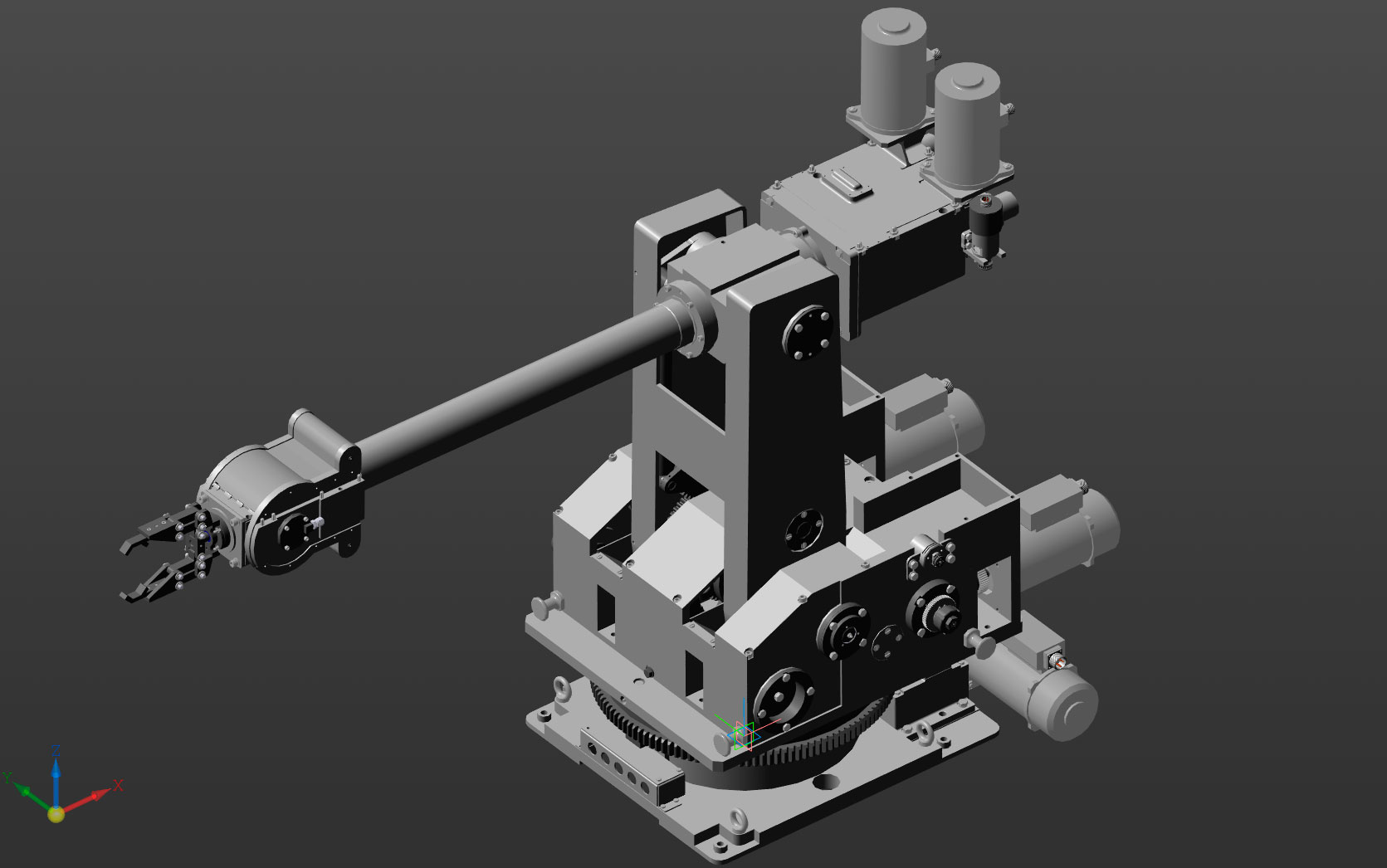
Предлагается 3D модели промышленного робота РПМ25 с двухстепенной рукой и сборочный чертеж.
Промышленный робот РПМ-25 создан в 1976-1978 годах Калабиным В.Г Степановым В.П Козыревым Ю.Е в ЦНИТИ г Москва.
В основу робота заложена модульная конструкция узлов,позволяющая на основе основных модулей,создавать разные конфигурации робота.
Основные модули робота РПМ-25 :
Модуль поворота.
Модуль двойного качания. Качание руки,качание рычага с рукой.
Модуль руки с двумя степенями свободы. Качания кисти,поворот клещей.
Модуль руки с тремя степенями свободы..Вращение головки, качания кисти,поворот клещей.
Привод клещей пневматический.
Привода руки электродвигатели постоянного тока 4МИ12- ФС.
Привода модуля качания и модуля поворота электродвигатели постоянного тока МИ2.
За основу модели взяты чертежи общих видов альбома “Промышленные роботы в машиностроении” альбом схем и чертежей. Соломенцев Ю.М стр. 49,51.52,53,12.
Кинематическая схема рука двухстепенная РПМ-25 “Промышленная робота-техника т1” Шифрин Я.А. Рис 132 стр. 55.
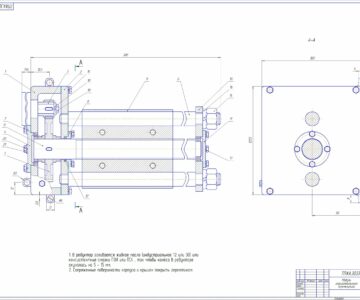
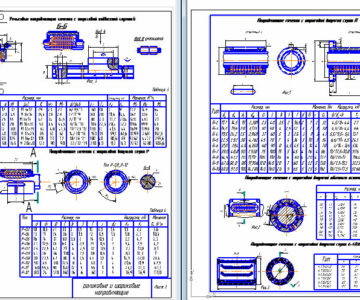
Произведен расчет зубчатых передач редуктора поворота, редуктора двойного качания, дифференциального редуктора привада качания и поворота кисти, червячного редуктора первой степени приводов, зубчатой -ременной привода кодовых датчиков, конической передачи головки кисти.
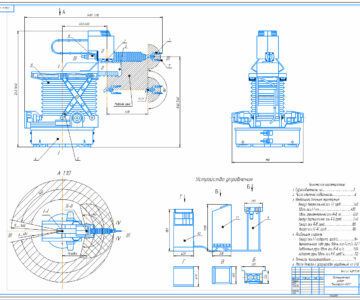
Конструкция корпуса головки кисти изменена по типу ПР Универсал 15-01.
Защита головки и кисти выполнена по типу ПР Универсал 15-01.
Кодовый датчик положения ДП8-1 заменен на современный ПФ-ДУ-16-50.
Привод клещей манипулятора с пневматического переведен на гидравлический.
Клещи выполнены по типу ПР Универсал 15-01.
Пневмогидравлический преобразователь или насосная станция привода клещей условно не показана.
Внимание ! При открытии сборки ругается на недостающие файлы, на самом деле все файлы присутствуют и пути к ним надо указывать вручную.