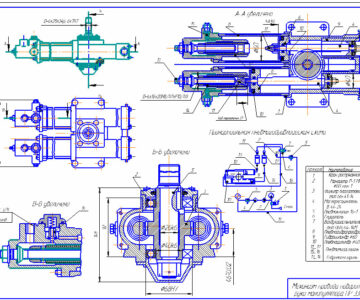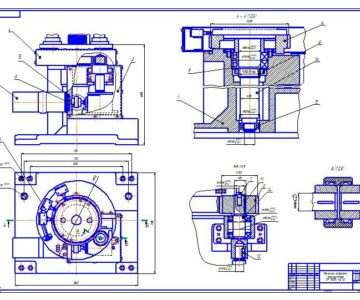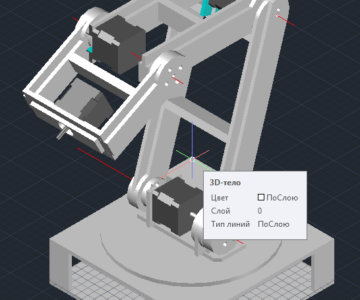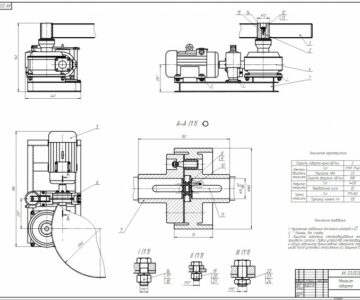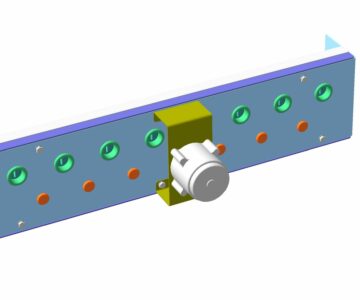
Механизм поворота руки манипулятора. Манипулятор является исполнительным устройством робота и предназначен для поворота руки робота вокруг вертикальной оси. Механизм состоит из двух элетродвигателей 4А180М6У3 и 4А160М8У3 ,поворотного стола к которому крепится рука манипулятора промышленного робота, червячной передачи в которую входят - червячное колесо без ступицы и червячное колесо со ступицей. С помощью эксцентрика регулируется зазор в червячной передаче.
Техническая характеристика механизма:
- масса, кг 82,5
- габариты, ВхД, мм 390х780
- передаточное отношение 91
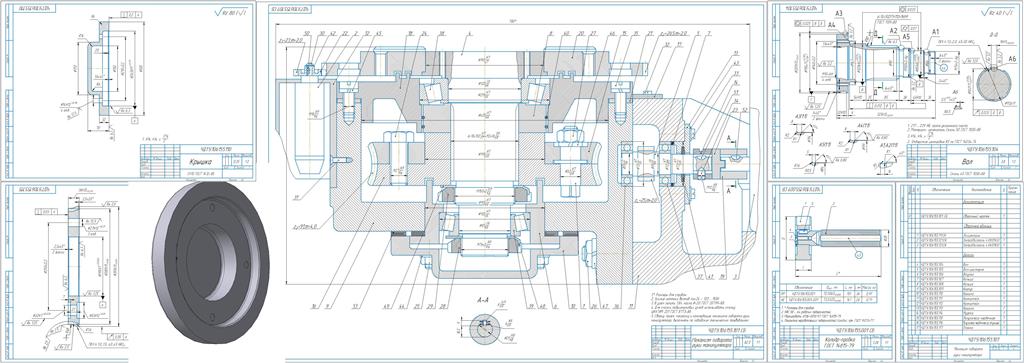
Также прилагается инструмент для контроля отверстия D=72Н7 в корпусе под посадку наружного кольца подшипника - калибр-пробка 72Н7. Калибр-пробка 72Н7 выполнен сборным с проходной (ПР) и непроходной насадкой (НЕ), согласно технических характеристик по ГОСТ 14815-79.