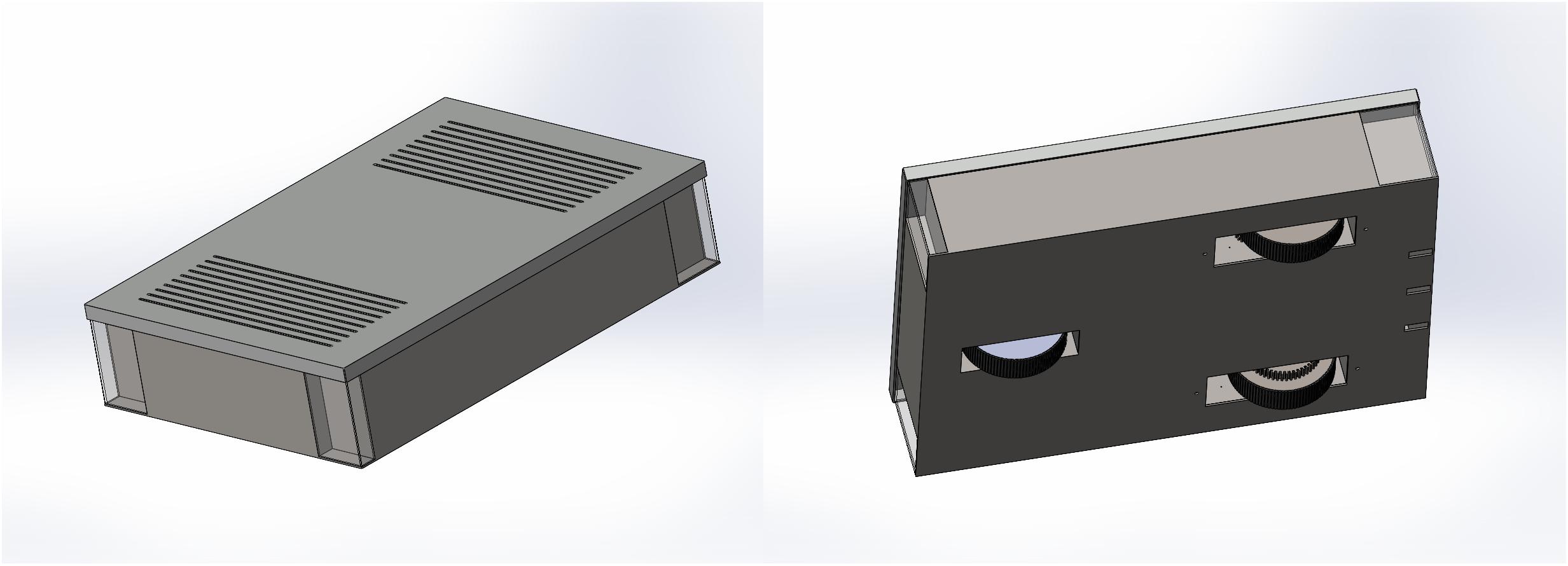
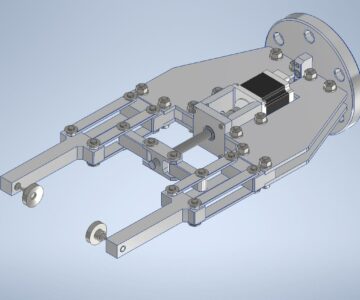
Разрабатываемый обьект: транспортная автоматизированная тележка-робот, предназначенная для работы в логистике для перемещения по складским комплексам грузов до 100 кг.
Оборудована датчиками фотоэлементами и оптикой для контроля траектории движения.
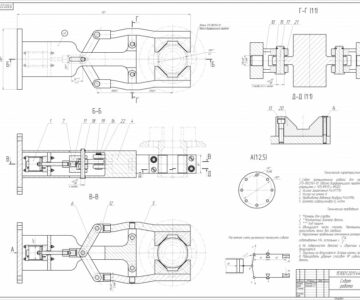
1. Исходные данные по работе: Необходимо разработать роботизированную тележку для перемещения детазей между складом и роботизированным. Привод тележки - электрический. Преодолеваемое расстояние с одной зарядки аккумулятора не менее 1000 м, масса перевозимого груза 100 кг и максимальные габариты не более ширина 1000×высота 1000×длина 1500 мм.
Сконструировать тележку с тремя колесами. Первые два колеса являются ведущими. Каждое из двух колес использует двигатель постоянного тока. Задние колеса не являются ведущими колесами и могут служить опорой(Универсальное колесо). Можно контролировать скорость двух двигателей, делать их разными, реализовывать функцию рулевого управления. Установите оптическая датчика в нижней части передней части тележки. Тележка может распознать белую линию черезоптическая датчика и следовать по дороге. Надо еще добавить спереди датчик, который бы предотвращал контакт роботизированной тележки с человеком, который случайно оказался на белой линии, ультразвуковой сканер.
- Главная -
- Чертежи -
- Автоматизация и управление -
- Промышленные роботы и робототехника -
- Модель робота-кладовщика, следующего по линии, грузоподъемностью до 100 кг
Модель робота-кладовщика, следующего по линии, грузоподъемностью до 100 кг
1
2
149
5
0
30
Сообщить о проблеме
Автор
Дата
25.11.2023
Язык
Русский
Состав
3D сборка и бонусом записка по НИР
Софт
SolidWorks 2016
Как открыть?
Содержимое архива
-
Детали СОЛИД тележк
-
Вал 100.SLDPRT
-
Вал.SLDPRT
-
Колесо без зубьев.SLDPRT
-
Колесо.SLDPRT
-
Крышка весов.SLDPRT
-
Крышка привода.SLDPRT
-
Привод.SLDPRT
-
Протектор.SLDPRT
-
РАМА2.SLDPRT
-
Стекло фары.SLDPRT
-
Шестеренка двигателя.SLDPRT
-
-
Otchet_o_datchikakh_25913.doc
-
Robotizirovannaya_telezhk.doc
-
МОДЕЛЬ ТЕЛЕЖКА.SLDASM
Чтобы скачать чертеж, 3D модель или проект, Вы должны зарегистрироваться
и принять участие в жизни сайта. Посмотрите, как тут скачивать
файлы
Еще чертежи и проекты по этой теме:

Задания с фриланса
Комментариев пока нет
Чтобы оставить комментарий, необходимо войти
Войти с помощью:
Ссылка на логин через google
Ссылка на логин через vk
Ссылка на логин через yandex