Тульский Государственный Университет
Робототехника и автоматизация производства (РТиАП)
Курсовая работа по дисциплине "Приводы роботов и РТС"
На тему "Проектирование приводы робота"
Тула 2017
Исходные данные:
1. Ход поршня X=0,1 м.
2. Перемещаемая масса M=1,6 кг.
3. Сила нагрузки F_н=22 Н.
4. Время срабатывания T=0,8 с.
5. Давление питания P_м=5∙〖10〗^5 Н/м^2.
Требуется рассчитать:
1. Площадь поршня S_п.
2. Диаметр штока d_шт.
3. Диаметр цилиндра d_ц.
4. Площадь отверстия на входе пневмоцилиндра S_вх.
5. Площадь отверстия на выходе пневмоцилиндра S_вых.
Разработка пневматической схемы и составление описания работы модуля подвижности промышленного робота, расчет параметров и выбор пневмопривода двустороннего действия. Курсовая работа. Тульский государственный университет. - Тула, 2017. - 19 с.: 2ч А2
ЗАДАНИЕ………………………………………………………………………4
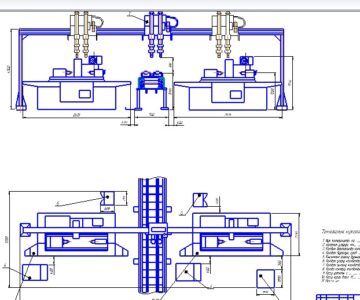
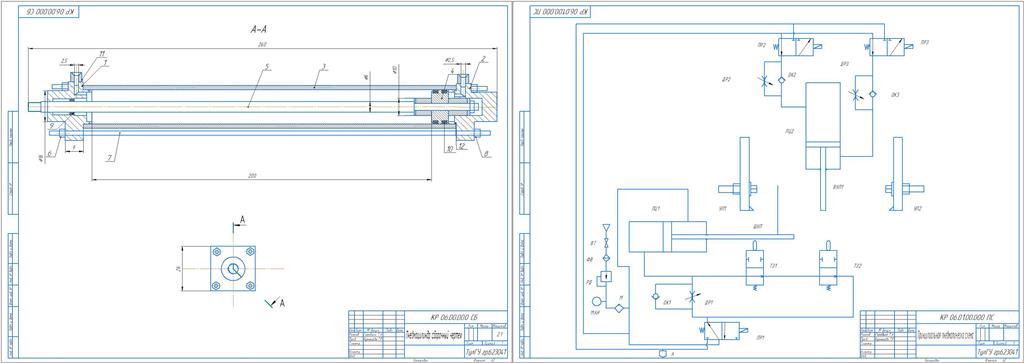
1. РАЗРАБОТКА ПНЕВМАТИЧЕСКОЙ СХЕМЫ И СОСТАВЛЕНИЕ ОПИСАНИЯ РАБОТЫ ПОДУЛЯ ПОДВИЖНОСТИ ПРОМЫШЛЕННОГО РОБОТА……………………………………………………………………………5
1.1. Назначение элементов, используемых в схеме…………………...…7
1.2. Описание работы модуля подвижности промышленного робота.....9
2. РАСЧЕТ ПАРАМЕТРОВ И ВЫБОР ПНЕВМОПРИВОДА ДВУХСТОРОНЕГО ДЕЙСТВИЯ………………………………………………11
2.1. Определение потребной мощности привода……………………….11
2.2. Определение параметров линии питания………………………..…14
2.3. Оценка величины движущей силы сопротивления…………….…..15
2.4. Выбор площади сечения поршня……………………………………16
2.5. Определение конструктивных размеров пневмопривода……...….17
3. ПОДБОР СОСТАВА СХЕМЫ…………………………………………….…18
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ……………………………...19