БелГУТ, материаловедение и технология материалов, АПП, Проектирование промышленных роботов, 2015
Данный курсовой проект содержит: формат А1, 24 страницы пояснительной записки
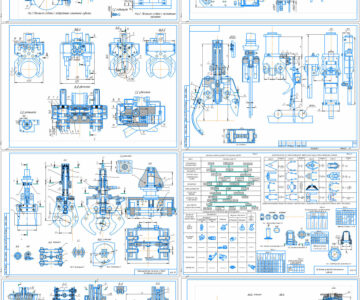
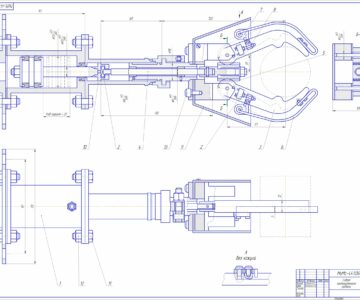
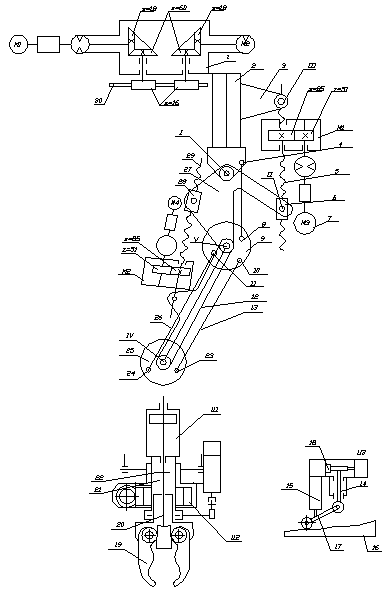
Техническая характеристика робота УМ16Ф2.81.01. Грузоподъемность 160 кг; число захватных устройств 1, число обслуживаемых технологических единиц 4; число степеней подвижности 4; линейные перемещения X (при скорости 1,2 м/с) 16 000 мм; угловые перемещения θ1, θ2 (при скорости 30°/с) 90°, α (при скорости 90°/с) 90-180°.
Для автоматизации загрузки и разгрузки станков в линии изготовления вала я можно использовать промышленный робот модели УМ16Ф2.81.01.
Универсальный промышленный робот УМ16Ф2.81.01 с ПУ предназначен для группового обслуживания оборудования, в основном металлорежущих станков с горизонтальной осью шпинделя или горизонтальным столом. ПР производит установку-снятие деталей и их межстаночное транспортирование. Промышленный робот может обслуживать токарные, фрезерно-центровальные, шлифовальные, зубообрабатывающие и другие станки. Промышленный робот оснащен широкодиапазонными быстросменными хватными устройствами, возможна автоматическая смена захватных устройств.