Волгоградский экономико-технический колледж
Кафедра технических дисциплин
Дипломный проект по теме: "Разработка мехатронного модуля промышленного робота РГШ-40.02"
Волгоград, 2017
Исходные данные к ВКР: Технические характеристики: Fпол=1710 Н, число рабочих циклов Z=50, для заготовки типа вал dmax=50 мм, dmin = 30 мм.
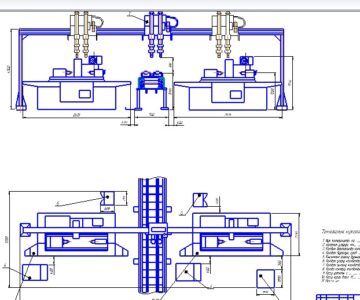
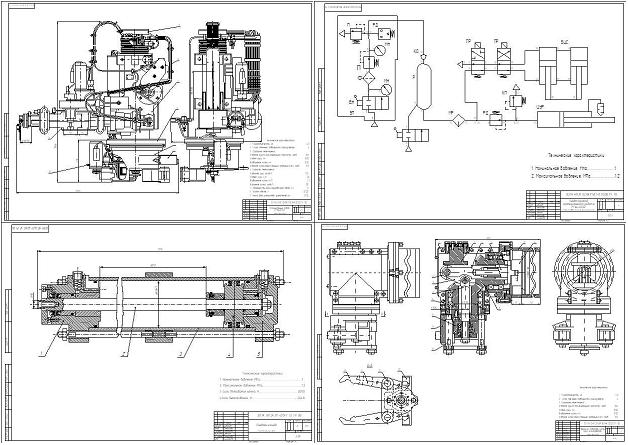
В данной работе рассматривается структура промышленного робота РГШ-40.02, его технические характеристики, а так же производится расчет параметров захватного устройства и анализ устройства манипулятора.
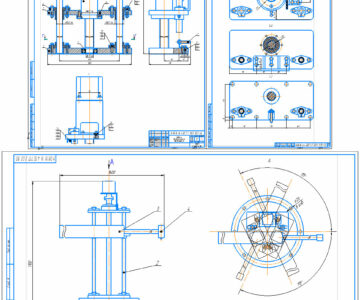
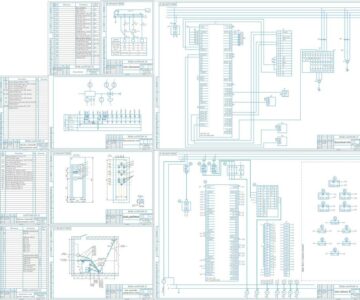
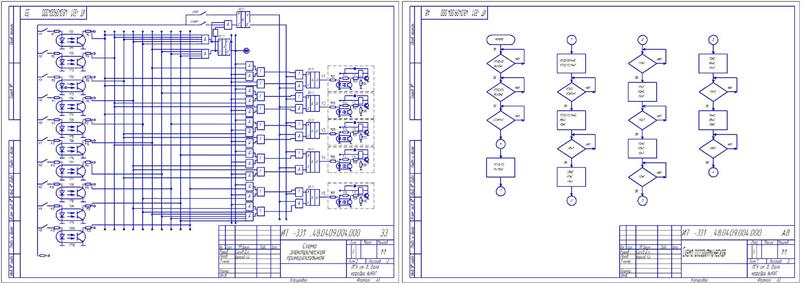
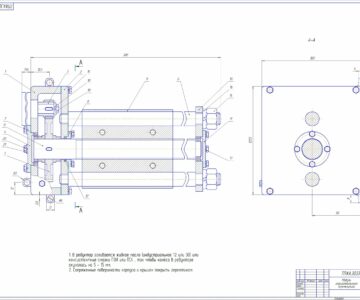
Графическая часть содержит общий вид промышленного робота РГШ-40.02, схему гидравлическую принципиальную и схему гидроцилиндра.
Содержание
Введение………………………………………………………………...........5
1 Общая часть:
1.1 Применение промышленных роботов………………………………….9
1.2 Роботизированный технологический комплекс………………..............11
1.3 Классификация промышленных роботов……………………................14
2 Технологическая часть
2.1 Структура промышленного робота РГШ-40.02……………..................19
2.2 Конструкция и варианты исполнения промышленно робота................21
2.3Рабочие органы промышленного робота РГШ-40.02…………..............24
2.4 Устройство манипулятора промышленного робота…………………...26
2.5 Принципы построения конструкции роботов………………….............30
2.6 Техническая характеристика промышленного робота
РГШ-40.02………………………………………………………………….............31
2.7 Наладка и монтаж промышленного робота РГШ 40.02……….............32
3 Исследовательская часть
3.1 Применения приводов различных типов в
промышленных роботах…………………………..……………………................34
3.2 Программно-аппаратное обеспечение функционирования промышленными роботами……………………....……………………….............38
4 Конструкторская часть:
4.1 Пневматический привод промышленного робота РГШ 40.02………...43
4.2 Электропривод промышленного робота………………………………..44
4.3 Проверочный расчет мехатронного модуля – пневматического
двигателя. Определение типоразмера пневматического двигателя.……… .….46
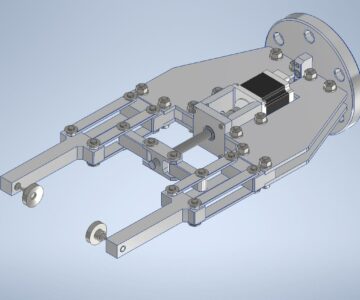
4.4 Определение типоразмера мехатронного модуля - захватное устройство промышленного робота РГШ 40.02.……………………......................................49
4.5 Проверочный расчет захватного устройства.……………….............51
5 Охрана труда:
5.1 Требования безопасности к промышленным роботам, роботизированным технологическим комплексам и гибким производственным системам.……………………...………………………………………………….58
Заключение……………………………………………………………………63
Список используемой литературы……………………………………….66