Одесский национальный политехнический университет
Кафедра машиноведения и деталей машин
Курсовой проект по дисциплине «Теория механизмов и машин»
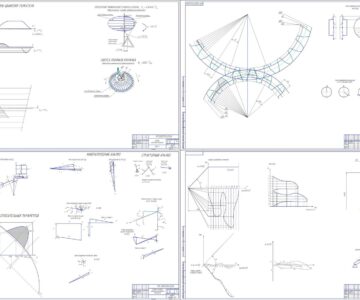
на тему: «Механизмы поперек-строгального станка»
Одесса 2015
Исходные данные: Межцентровое расстояние О2О3 = 70 мм
Ход ползуна С HС= 250 мм
Коэффициент изменения скорости хода КV = 2
Относительный размер O3S3/O3B=0,45; BC/BO3=3; BS4/BC= 0,5
Координаты, определяющие положение точки S5 и линию действия силы FПС
а = 230мм, в= 100 мм
Массы звеньев механизма m3= 70кг, m4= 9кг, m5 = 160кг
Осевой момент инерции кулисы IS3=0,05кг ∙м2 ; IS4=0,11кг ∙м2
Коэффициент неравномерности движения кривошипа б = 1/25 = 0,04
Частота вращения электродвигателя nДВ = 5500об/мин
Общее передаточное отношение привода iН5 = 142
Сила полезного сопротивления FПС = 850H
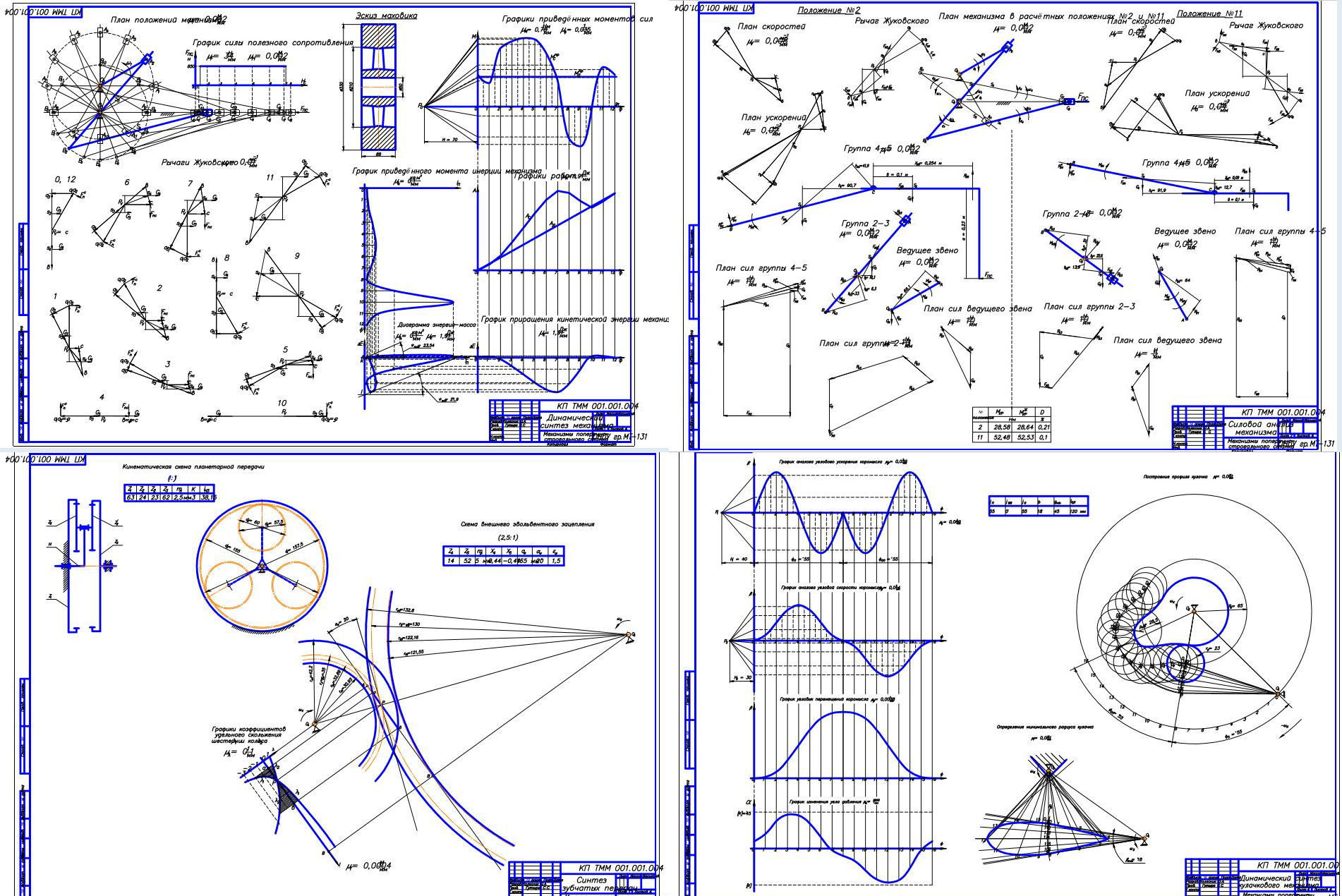
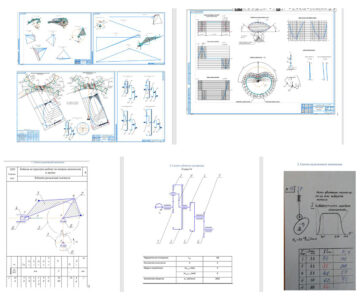
1. Определение момента инерции маховика по заданному коэффициенту
неравномерности движения
1.1. Исходные данные
1.2. Синтез кинематической схемы рычажного механизма
1.3.Построение плана положений механизма
1.4. Построение планов скоростей
1.5. Определение приведённого момента сил сопротивления и сил
тяжести Мспр
1.6. Построение графика приведенного момента сил сопротивления"М" _"пс" (φ).
1.7. Построение графиков работы сил сопротивления"А" _"с" (φ) и сил
движущих"А" _d (φ)
1.8. Построение графика постоянного приведённого момента сил
движущихM_("п" d) (φ).
1.9. Построение графика приращения кинетической энергии
механизма"∆Е " (φ).
1.10. Определение значений приведённого момента инерции рычажного
механизма
1.11. Построение диаграммы «энергия - масса» Е(Iп)
1.12. Определение момента инерции маховика
1.13. Расчёт маховика
1.14. Определение истинных значений угловой скорости 1и углового
ускорения 1
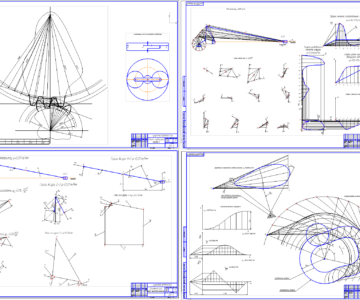
2. Динамический анализ механизма
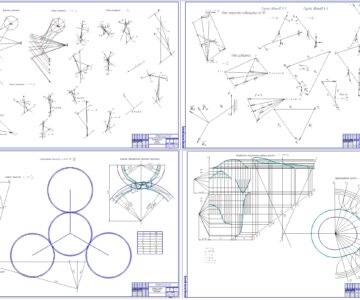
2.1. Построение планов положений и скоростей
2.2. Построение плана ускорений для положения № 2.
2.3. Структурный анализ механизма
2.4. Определение системы сил, действующих на звенья механизма
2.5. Силовой расчёт механизма в положении № 2
2.5.1. Силовой расчёт группы 4-5
2.5.2. Силовой расчёт группы 2 – 3
2.5.3. Силовой расчёт ведущего звена
2.5.4. Определение уравновешивающей силы Fур при помощи «рычага»
Н. Е. Жуковского.
2.5.5. Сравнение результатов
2.6. Силовой расчёт механизма в положении № 11
2.6.1. Силовой расчёт группы 4-5
2.6.2. Силовой расчёт группы 2 – 3
2.6.3. Силовой расчёт ведущего звена
2.6.4. Определение уравновешивающей силы Fур при помощи «рычага»
Н. Е. Жуковского.
2.6.5. Сравнение результатов
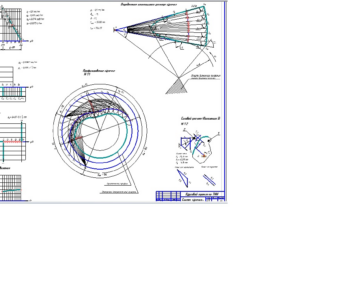
3. Кинематический и геометрический синтез комбинированной зубчатой
передачи
3.1. Исходные данные
3.2. Синтез планетарного механизма
3.3.Расчёт основных параметров внешнего эвольвентного зацепления
3.4.Построение схемы зацепления
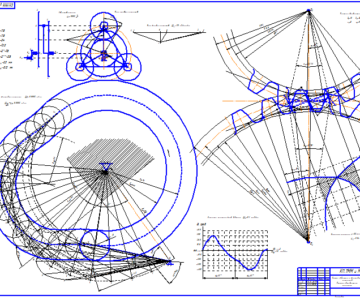
4. Динамический синтез кулачкового механизма
4.1.Исходные данные
4.2.Построение кинематических диаграмм движения коромысла
4.3.Определение минимального радиуса кулачка
4.4.Построение профиля кулачка
5. Список литературы





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности