УО «Брестский Государственный Технический Университет»
Кафедра машиноведения
Курсовая работа по дисциплине «Теория машин и механизмов»
Тема: "Механизмы компрессора"
Брест 2017
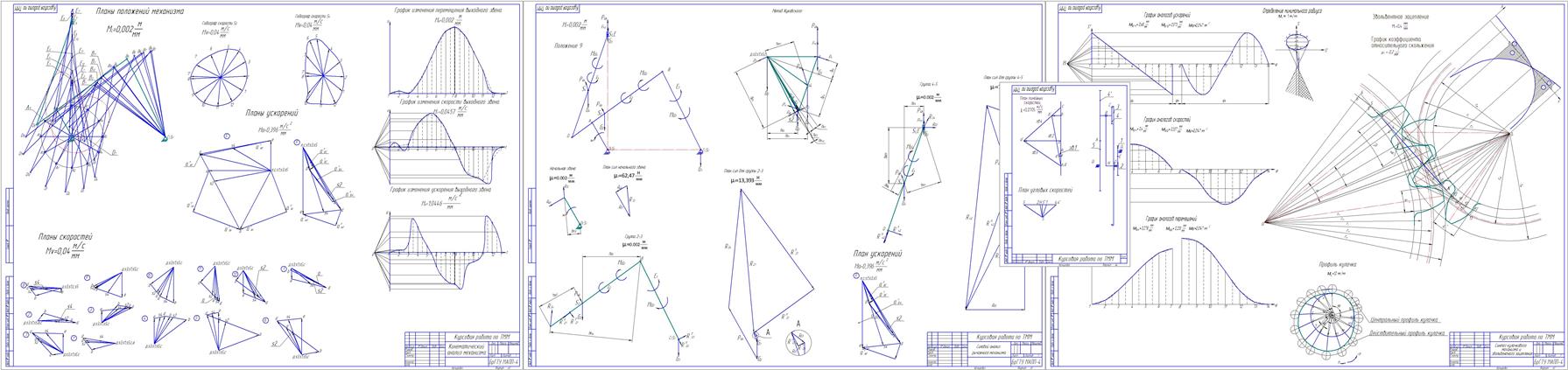
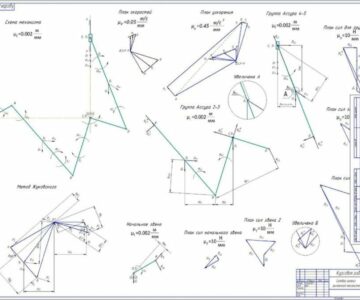
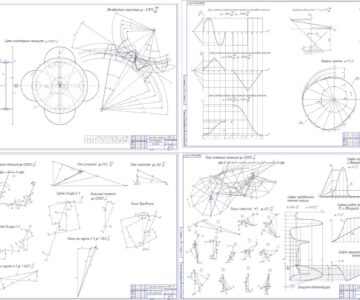
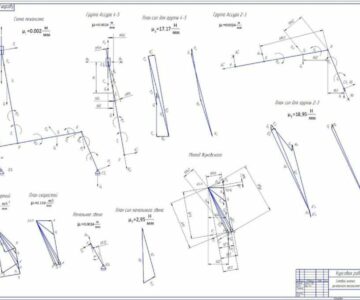
Исходные данные кинематического анализа: Lab=0.28м, Lao=0.1м, Las2=0.05м, Lbc=0.28м, Loc=0.3м, Lds4=0.16м, Lde=0.35м, Lаd=0.08м; Принятое звено АО=50 мм. Масштабный коэффициент длины 0,002 м/мм; l – длина отрезка на оси абсцисс (185 мм);
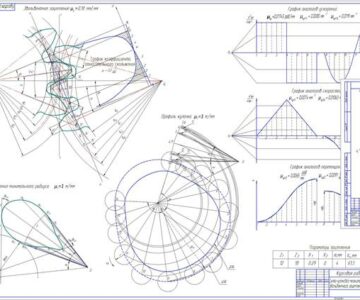
Силовой анализ рычажного механизма: G2=36кг G3=16кг, G4=36кг G5=18кг;
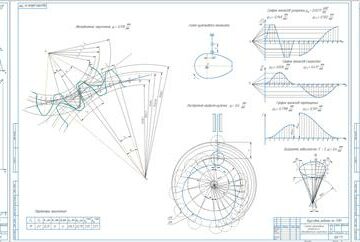
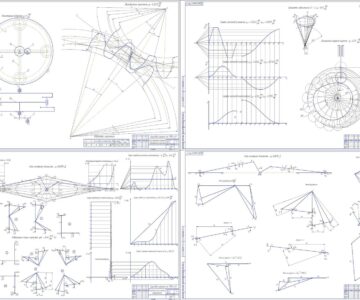
Расчет эвольвентного зацепления: модуль зацепления m=9 мм, число зубьев колес Z1=13, Z2=24, n1 = 190 мин -1, n2= 820 мин -1.
Синтез кулачкового механизма: фаза удаления φ_у =130˚
фаза дальнего стояния φ_д =15˚
фаза возврата φ_в =140˚
Содержание
1 Структурный анализ механизмов……………………………………………………………………………………
1.1 Структурный анализ рычажного механизма……………………………………………………………
1.2 Структурный анализ кулачкового механизма……………………………………………
1.3 Структурный анализ зубчатого механизма………………………………………………
2 Кинематический анализ рычажного механизма………………………………………………………
2.1 Планы положений механизма………………………………………………………………
2.2 Определение скоростей………………………………………………………………………………………
2.3 Определение значений скоростей точек и звеньев механизма………………
2.4 Построение планов ускорений…………………………………………………………
2.5 Определение скоростей и ускорений выходного звена графическим методом………
3 Силовой анализ рычажного механизма………………………………………………
3.1 Определение силы тяжести………………………………………………………………
3.2 Определение силы инерции звеньев………………………………………………………………………
3.3 Определение моментов инерции звеньев…………………………………………………………
3.4 Силовой расчет методом планов сил…………………………………………………………
3.5 Расчет уравновешивающей силы методом Жуковского…………………………………
4 Проектирование кинематической схемы планетарного редуктора и
расчет эвольвентного зацепления……………
4.1 Проектирование планетарного редуктора……………………………………………………………
4.2 Картина линейных и угловых скоростей………………………………………………………………………
4.3 Расчет параметров зубчатого зацепления……………………………………………………
5 Синтез кулачкового механизма………………………………………………………………………
5.1 Построение графиков аналогов ускорений, скоростей и перемещений………
5.2 Определение Rmin и построение профиля кулачка……………………………………………





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности