УО «Брестский Государственный Технический Университет»
Кафедра машиноведения
Курсовая работа по дисциплине «Теория машин и механизмов»
Тема: "Механизмы компрессора"
Брест 2017
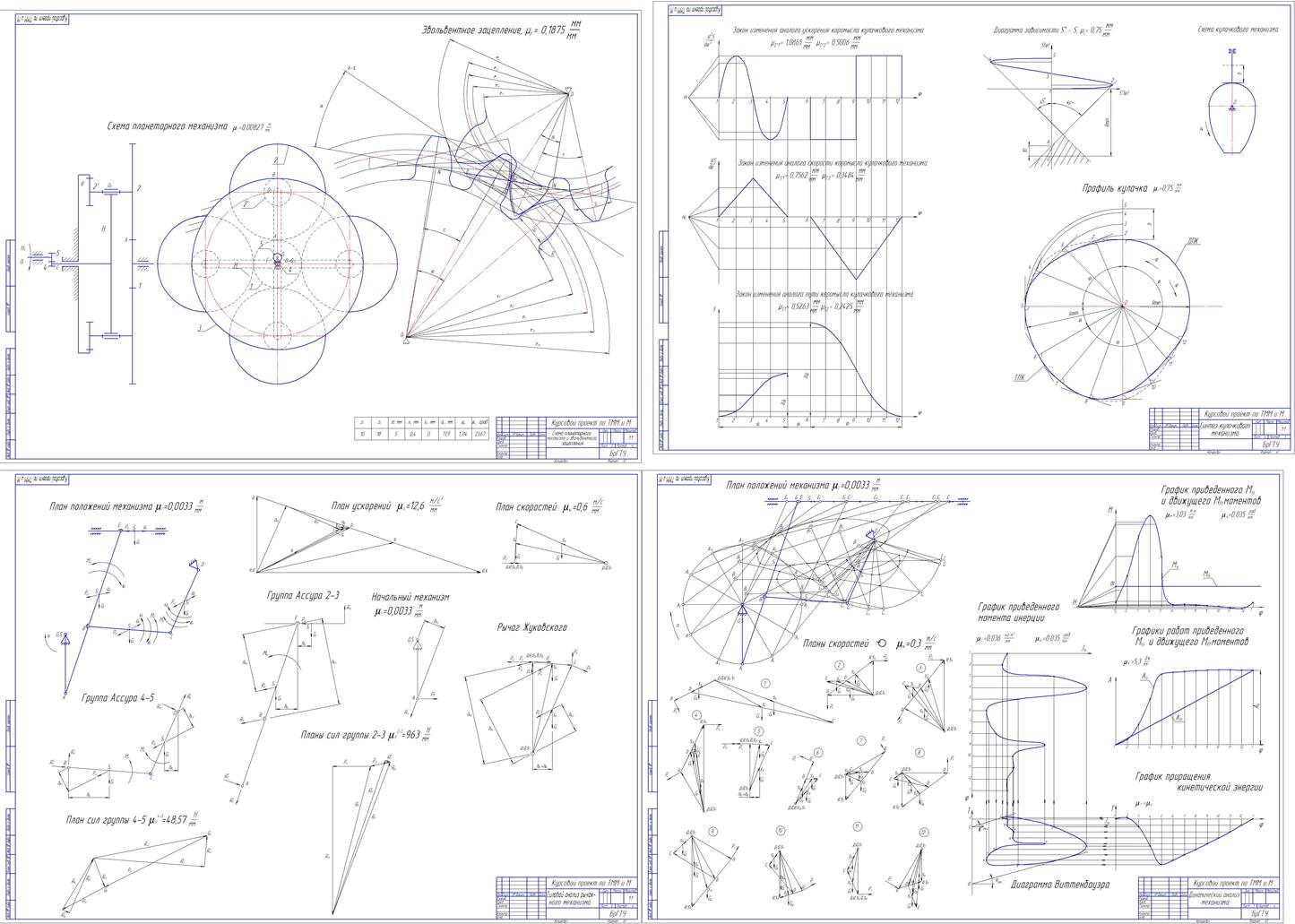
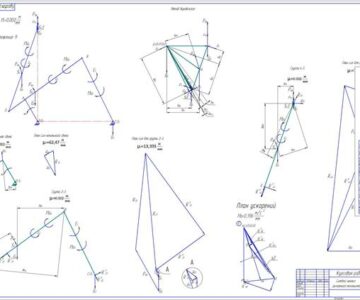
Исходные данные кинематического анализа: Lab=0.31м, Lao=0.26м, Lbs2=0.44м, Lbc=0.36м, Lbe=0.36м, Ldc=0.44м, Lbs4=0.18м, Les3=0.06м; Принятое звено АО=52 мм. Масштабный коэффициент длины 0,0033 м/мм; l – длина отрезка на оси абсцисс (185 мм);
Силовой анализ рычажного механизма: G2=7.8кг G3=13кг, G4=4.5кг G5=4кг;
Расчет эвольвентного зацепления: модуль зацепления m=5 мм, число зубьев колес Z4=10, Z5=18, i4-5=0.55
Содержания:
1 Структурный анализ механизмов 4
1.1 Структурный анализ рычажного механизма 4
1.2 Структурный анализ кулачкового механизма 7
1.3 Структурный анализ зубчатого механизма 8
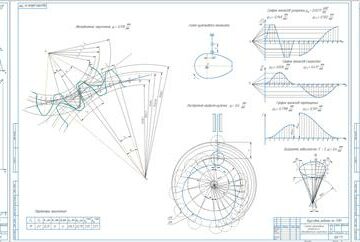
2 Динамический синтез рычажного механизма 9
2.1 Построение плана положений механизма 9
2.2 Построение повернутых планов скоростей 9
2.3 Определение значений линейных и угловых скоростей точек и звеньев механизма 10
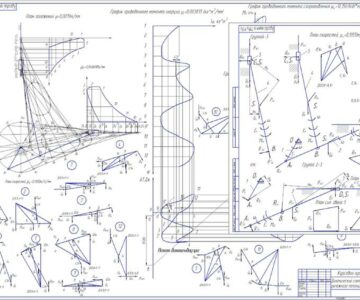
2.4 Определение приведенной силы сопротивления 12
2.5 Определение приведенных моментов сил сопротивления и моментов сил движущих. Построение графика изменения кинетической энергии 13
2.6 Определение приведенных моментов инерции. Построение графика 15
2.7 Определение приведенного момента инерции маховика 16
2.8 Определение параметров маховика……………………………………………………….17
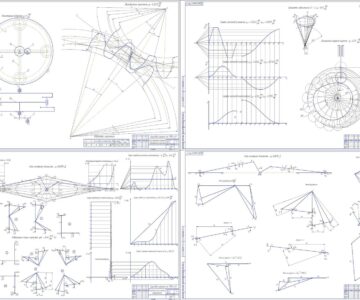
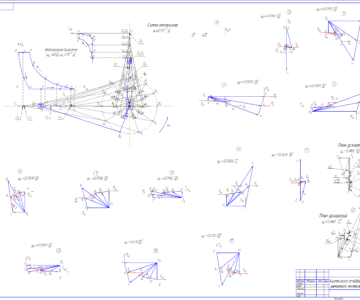
3 Силовой расчет рычажного механизма 19
3.1 Определение ускорений 19
3.2 Определение сил и моментов инерции 20
3.3 Определение реакций в кинематических парах и уравновешивающей силы методом планов сил 21
3.4 Определение уравновешивающей силы методом Жуковского 23
3.5 Расчет погрешностей 2-х методов 24
4 Расчет кинематической схемы планетарного редуктора и построение эвольвентного зацепления 25
4.1 Подбор числа зубьев и числа сателлитов планетарного редуктора 25
4.2 Расчет параметров зубчатых колес и зубчатого зацепления 27
4.3 Определение коэффициента зацепления зубчатой передачи графическим способом 30
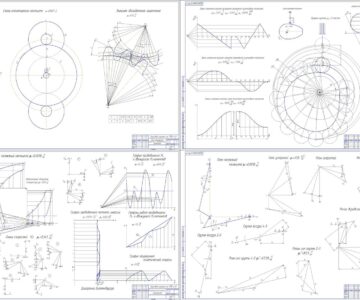
5 Синтез кулачкового механизма 31
5.1 Построение графиков аналогов скоростей,ускорений и пути 31
5.2 Определение минимального радиуса кулачка. Построение профиля кулачка 32
Литература 34





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности