УО «Брестский Государственный Технический Университет»
Кафедра машиноведения
Курсовая работа
По дисциплине «Теория машин и механизмов»
Брест 2016
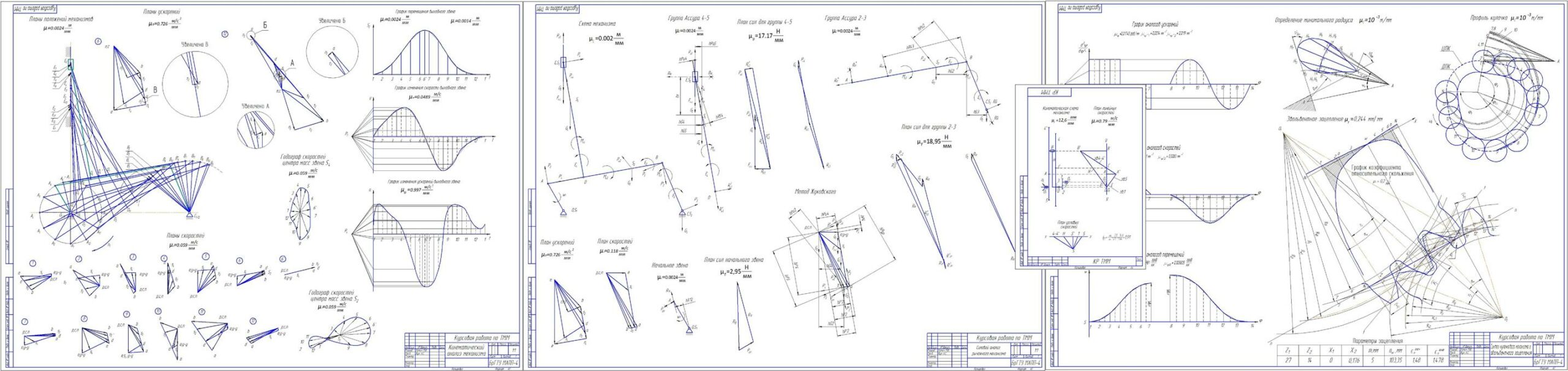
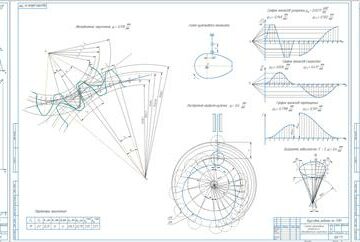
Исходные данные кинематического анализа: Lab=0.45м, Lao=0.12м, Las2=0.33м, Lbc=0.2м, Loc=0.46м, Lds4=0.3м, Lde=0.45м, Lad=0.14м; Принятое звено АО=50 мм. Масштабный коэффициент длины 0,0024 м/мм; l – длина отрезка на оси абсцисс (180 мм);
Силовой анализ рычажного механизма: G2=G4=25 кг, G3=G5=20;
Расчет эвольвентного зацепления: модуль зацепления m=5 мм, число зубьев колес Z1=27, Z2=14, n1 = 235 мин -1, n2= 450 мин -1.
Синтез кулачкового механизма: фаза удаления φ_у =100˚
Содержание
1 Структурный анализ механизмов………………………………………………………………………………………………………………………………………
1.1 Структурный анализ рычажного механизма……………………………………………………………………………………………………………
1.2 Структурный анализ кулачкового механизма…………………………………………………………………………………………………………
1.3 Структурный анализ зубчатого механизма………………………………………………………………………………………………………………
2 Кинематический анализ рычажного механизма…………………………………………………………………………………………………………
2.1 Планы положений механизма………………………………………………………………………………………………………………………………………………
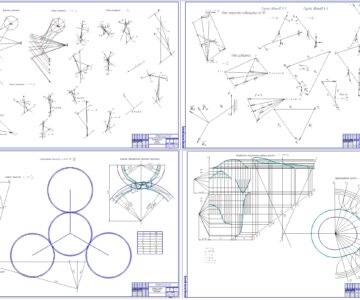
2.2 Определение скоростей………………………………………………………………………………………………………………………………………………………
2.3 Определение значений скоростей точек и звеньев механизма………………………………………………………………………
2.4 Построение планов ускорений…………………………………………………………………………………………………………………………………………
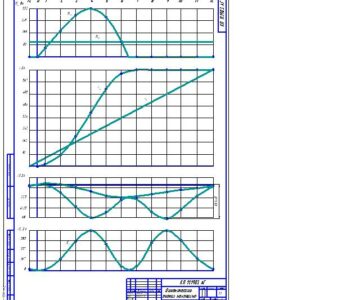
2.5 Определение скоростей и ускорений выходного звена графическим методом………………………………………
3 Силовой анализ рычажного механизма……………………………………………………………………………………………………………………………
3.1 Определение силы тяжести………………………………………………………………………………………………………………………………………………
3.2 Определение силы инерции звеньев………………………………………………………………………………………………………………………………
3.3 Определение моментов инерции звеньев……………………………………………………………………………………………………………………
3.4 Силовой расчет методом планов сил…………………………………………………………………………………………………………………………
3.5 Расчет уравновешивающей силы методом Жуковского………………………………………………………………………………………
4 Проектирование кинематической схемы планетарного редуктора и
расчет эвольвентного зацепления………………………………………………………………………………………………………………………………………
4.1 Проектирование планетарного редуктора…………………………………………………………………………………………………………………
4.2 Картина линейных и угловых скоростей……………………………………………………………………………………………………………………
4.3 Расчет параметров зубчатого зацепления………………………………………………………………… ………………………………………
5 Синтез кулачкового механизма…………………………………………………………………………………………………………………………………………
5.1 Построение графиков аналогов ускорений, скоростей и перемещений……………………………………………………
5.2 Определение Rmin и построение профиля кулачка…………………………………………………………………………………………………





Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности