Государственно учреждение высшего профессионального образования «БЕЛОРУССКО–РОССИЙСКИЙ УНИВЕРСИТЕТ»
Кафедра «Металлорежущие станки и инструменты»
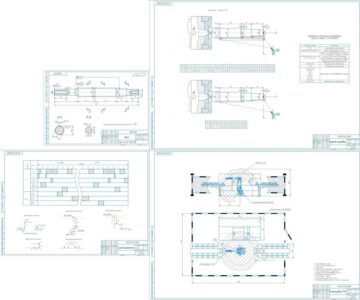
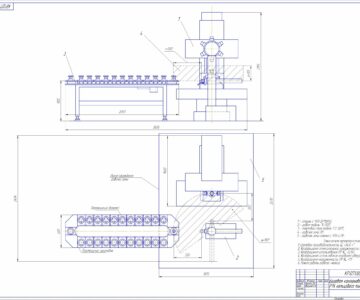
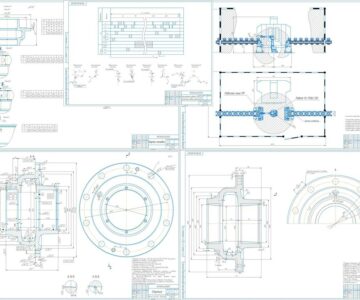
Курсовой проект по дисциплине: «Расчёт и конструирование средств автоматизации»
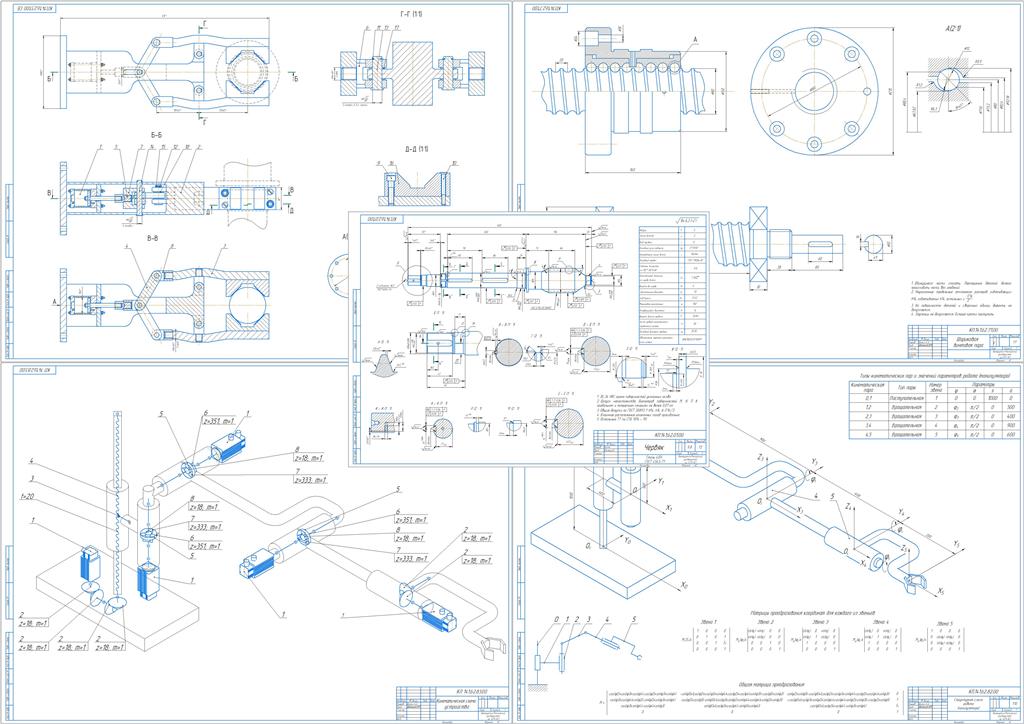
На тему: «Создание роботизированного технологического комплекса для изготовления червяка В0610Б.02.01.002РП
Могилев 2018
Задача курсового проекта по дисциплине «Расчет и конструирование средств автоматизации» – разработка технологического предложения на создание роботизированного технологического комплекса для изготовления червяка методом механической обработки и литья. Заданием на проектирование является чертеж червяка В0610Б.02.01.002РП.
Деталь предназначена для работы в составе мотора-редуктора лебедки лифта пассажирского. Лифт предназначен для перевозки пассажиров в жилых и административных зданиях.
Лебедка установлена в машинном помещении лифта и предназначена для приведения в движение кабины и противовеса.
Содержание
Введение………………………………………………………………………… 4
1 Анализ исходных данных…………………………………………………….. 5
2 Построение структурной схемы, структурный анализ и определение степени подвижности механизма робота……………………………………… 7
3 Составление системы уравнений движения центральной точки схвата относительно базовой системы в декартовых координатах………………….. 10
4 Разработка кинематической схемы устройства……………………………... 14
5 Синтез зубчатого механизма…………………………………………………. 17
5.1 Проектный расчет винтовой пары…………………………………………. 17
5.2 Проверочный расчет винта………………………………………………… 19
5.3 Проверочный расчет гайки…………………………………………………. 21
6 Проектирование захватного устройства…………………………………….. 24
6.1 Расчет потребного усилия захвата заготовки и приводного пневмоцилиндра………………………………………………………………... 26
6.2 Определение усилий в элементах схвата и его конструктивных параметрах………………………………………………………………………. 27
6.3 Конструкция и расчет губок схвата……………………………...………… 29
Заключение……………………………...………………………………………. 30
Список использованных источников………………………………………….. 31
Приложение……………………………………………………………………… 32
Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности