Ухтинский государственный университет
Кафедра электроэнергетики и метрологии
Курсовая работа по дисциплине "Теория автоматического управления"
На тему "Частотная коррекция линейных систем автоматического управления"
Ухта 2021
Исходные данные: Входным сигналом x(p) будет управляющее напряжение, а выходным сигналом y(p) (или регулируемым параметром) – угол поворота вала двигателя θ. Даны Передаточная функция регулятора скорости, Передаточная функция силового преобразователя, Передаточная функция датчика угла поворота, Передаточная функция двигателя постоянного тока с внутренним возбуждением, управляемого по якорной цепи.
Необходимо синтезировать корректирующее устройство последовательного типа, обеспечивающее необходимые показатели качества, при следующем задании:
U_дн=110 В номинальное напряжение двигателя;
P_дн=0.71 кВт номинальная мощность двигателя;
n_дн=4000 об/мин номинальная частота вращения двигателя;
I_ян=9.29 А номинальный ток в цепи якоря;
R_ян=1 Ом номинальное активное сопротивление якорной цепи;
J=0.056 кг∙м^2 приведённый к валу двигателя суммарный момент инерции.
В результате синтеза необходимо получить следующие показатели качества:
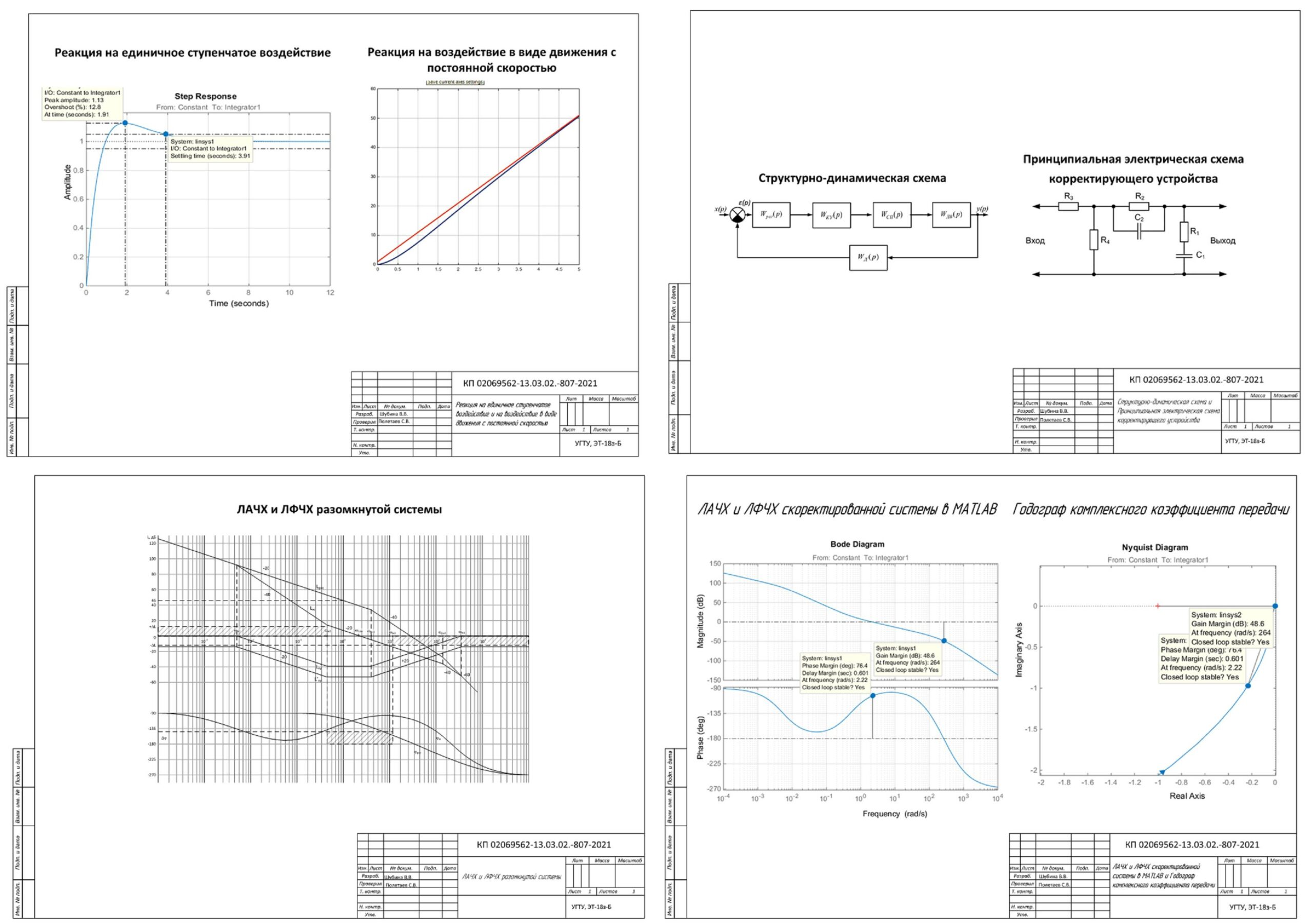
- при изменении управляющего напряжения с постоянной скоростью, равной 10 В/с, скоростная ошибка системы не должна превышать 0,08 В, т. е. ε_ск≤0,08 В;
- перерегулирование при номинальном ступенчатом воздействии на входе не должно превышать величины σ_зад≤38%;
- время регулирования при аналогичном воздействии не должно превышать значения t_уст≤4.8 с.
СОДЕРЖАНИЕ
ЗАДАНИЕ 4
ИСХОДНЫЕ ДАННЫЕ 7
1 СИНТЕЗ САУ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА 9
1.1 Определение передаточной функции двигателя 9
1.2 Определение передаточной функции разомкнутой системы 9
1.3 Определение требуемого коэффициента усиления разомкнутой системы 10
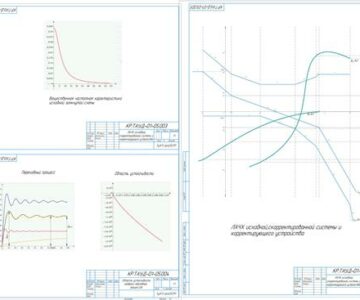
1.4 ЛАЧХ разомкнутой нескорректированной системы 10
1.5 Оценка устойчивости исходной нескорректированной системы 11
1.6 Построение желаемой ЛАЧХ 12
1.7 Передаточная функция корректирующего устройства и его электрическая схема 17
1.8 ЛФЧХ скорректированной системы 21
1.9 Передаточная функция скорректированной системы 22
2 ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ В СРЕДЕ MATLAB 23
ЗАКЛЮЧЕНИЕ 28
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 29



Используя функцию входа через сторонние сервисы, Вы соглашаетесь на обработку персональных данных в соответствии с Политикой конфиденциальности