ТулГУ 2016
по курсу
«Автоматизация транспортировки, загрузки и сборки изделий»
Кафедра Технологии Машино-Строения
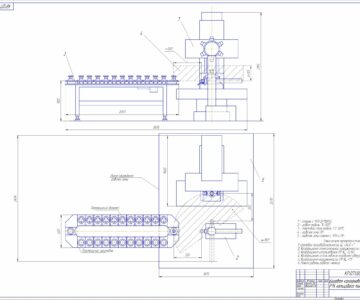
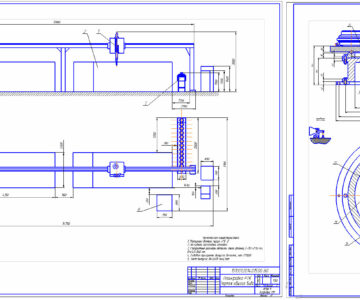
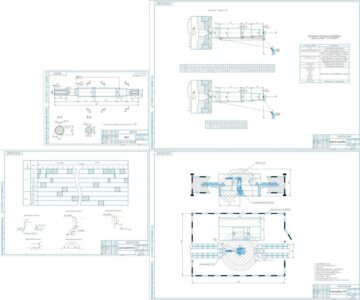
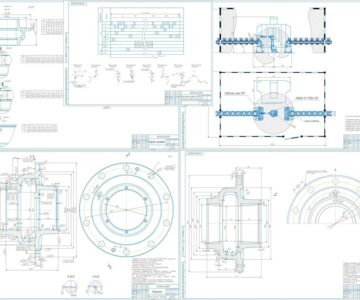
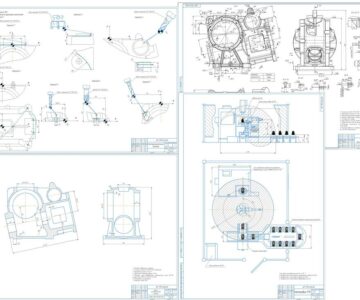
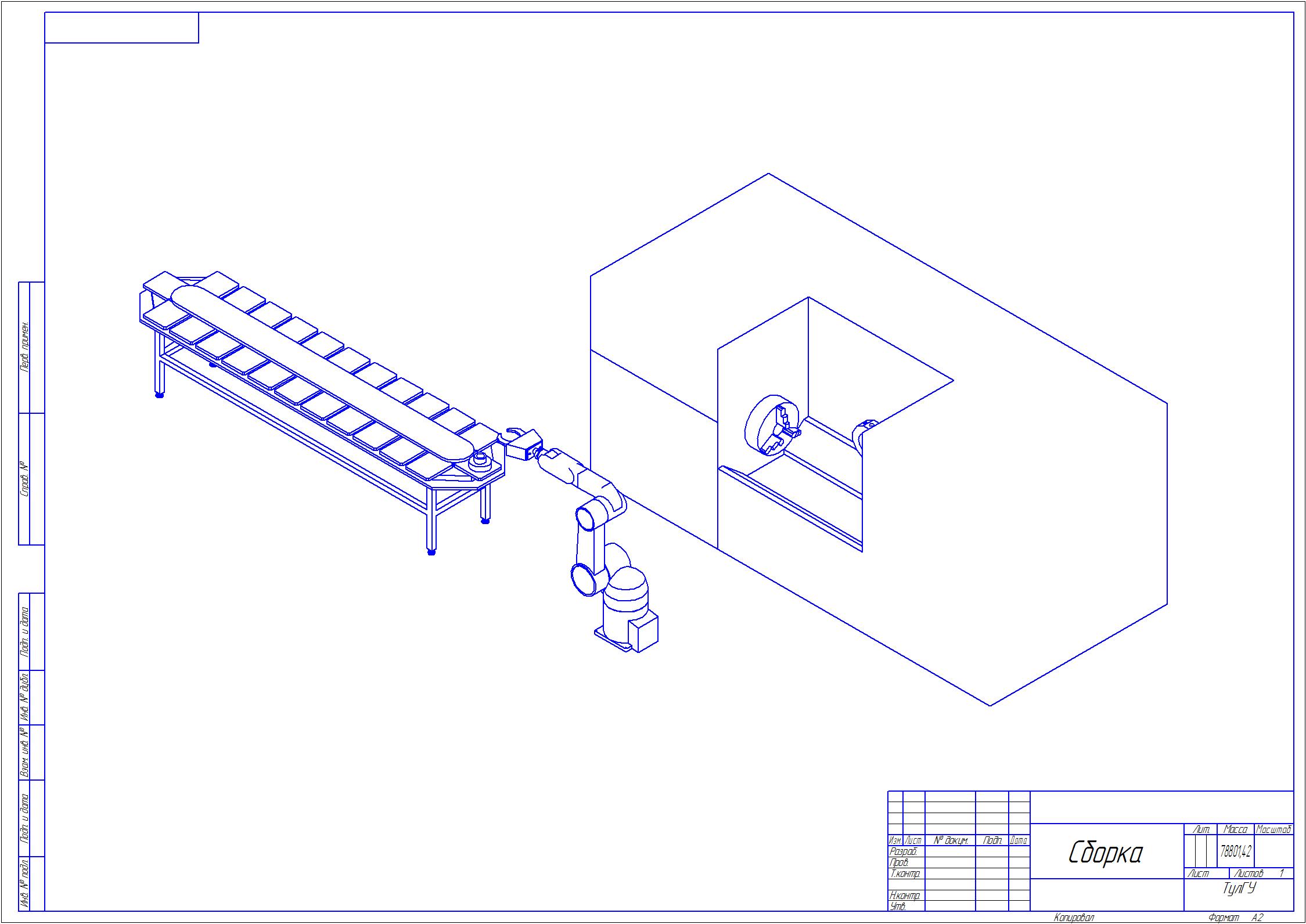
В данной курсовой работе проектируется роботизированный технологический комплекс для обработки деталей типа тел вращения (по заданию). Производится выбор необходимой модели промышленного робота по грузоподъемности и характеристикам рабочей зоны и его схвата, необходимого для выполнения требуемых манипуляций с заданной точностью. Разрабатывается рациональная планировочная схема роботизированного технологического комплекса (РТК) и исследуется цикл его работы с точки зрения максимальной производительности и надежности. Это позволяет осветить в курсовой работе все аспекты синтеза РТК.
Был выбран робот Viber s1300, тактовый стол СТ 220 и станок СТМ 100.
2 чертежа А2 и 2 чертежа А1. Пояснительная записка на 43 листа.